- Deutsch
-
EnglishDeutschItaliaFrançais한국의русскийSvenskaNederlandespañolPortuguêspolski繁体中文SuomiGaeilgeSlovenskáSlovenijaČeštinaMelayuMagyarországHrvatskaDanskromânescIndonesiaΕλλάδαБългарски езикGalegolietuviųMaoriRepublika e ShqipërisëالعربيةአማርኛAzərbaycanEesti VabariikEuskeraБеларусьLëtzebuergeschAyitiAfrikaansBosnaíslenskaCambodiaမြန်မာМонголулсМакедонскиmalaɡasʲພາສາລາວKurdîსაქართველოIsiXhosaفارسیisiZuluPilipinoසිංහලTürk diliTiếng ViệtहिंदीТоҷикӣاردوภาษาไทยO'zbekKongeriketবাংলা ভাষারChicheŵaSamoa日本語SesothoCрпскиKiswahiliУкраїнаनेपालीעִבְרִיתپښتوКыргыз тилиҚазақшаCatalàCorsaLatviešuHausaગુજરાતીಕನ್ನಡkannaḍaमराठी
Arbeitsprinzipien, Steuerungsmethoden und Anwendungen von Frequenzumrichtern
Katalog
Übersicht über den Frequenzumrichter (VFD)
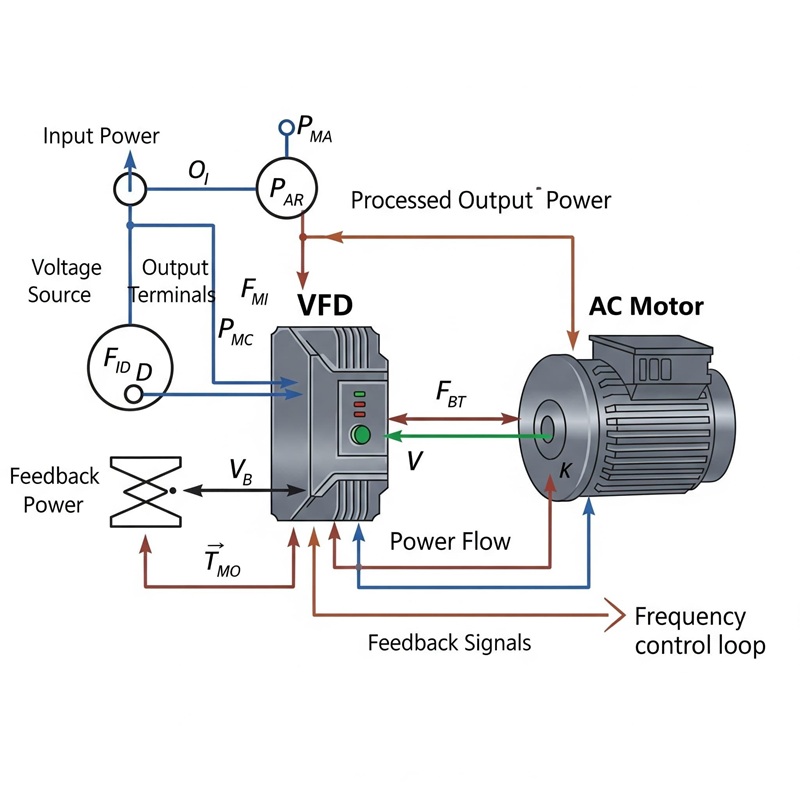
Ein Frequenzumrichter (VFD) ist ein leistungselektronischer Regler, der die Drehzahl und das Drehmoment eines AC-Motors reguliert, indem er die elektrische Frequenz des Stators anpasst und dabei die Ausgangsspannung und den Strom koordiniert, sodass der magnetische Fluss und der drehmomenterzeugende Strom des Motors innerhalb eines arbeitsfähigen Betriebsbereichs bleiben. Auf dem Werksgelände zeigt er sich weniger als einfacher "Drehzahlregler" und mehr als disziplinierter Drehmoment- und Stromregler, der zufällig die angeforderte Drehzahl erzeugt, wenn die elektrischen Bedingungen an den Motorklemmen unter Kontrolle gehalten werden.
Bei den meisten AC-Motoren bestimmt die elektrische Frequenz weitgehend die Geschwindigkeit des rotierenden Magnetfelds und die Motor-Drehzahl, wobei die Gleithäufigkeit des Induktionsmotors einen kleinen Unterschied zwischen beiden erzeugt. Wenn sich die Frequenz ändert, passt der Umrichter die Spannung an, um den richtigen magnetischen Fluss aufrechtzuerhalten. Zu wenig Fluss kann Drehmoment und Reaktion reduzieren, während zu viel Fluss den Strom, die Wärme und den Lärm erhöhen kann.
Viele moderne Umrichter steuern auch direkt den Motorstrom, um ein stabiles Drehmoment bei niedrigen Geschwindigkeiten, während plötzlicher Laständerungen oder wenn sich die Motorcharakteristika aufgrund von Temperaturveränderungen ändern, aufrechtzuerhalten.
Bei Inbetriebnahme und Fehlersuche fühlt es sich oft so an, als sollte die Frequenzregelung alles erklären, bis die erste schnelle Beschleunigung, abrupte Verzögerung oder Laststoß die Lücken aufdeckt. Die täglichen Leistungsunterschiede zwischen Umrichtern zeigen sich oft in der Qualität der Strommessung, der Regelung des Stromkreises und wie elegant der Umrichter Transienten verwaltet, anstatt im grundlegenden Frequenzbefehl selbst.
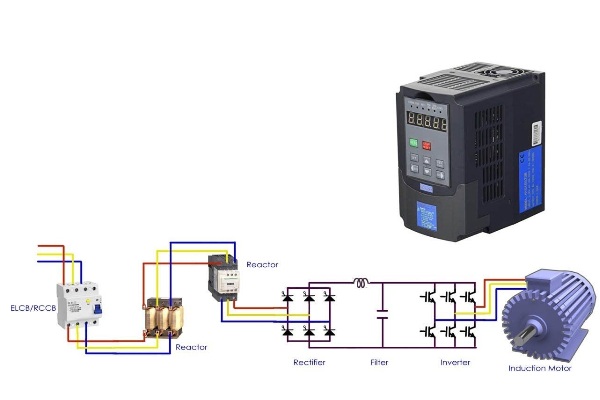
Die meisten industriellen VFDs verwenden eine AC-DC-AC-Struktur, da sie robust, kostensparend und anpassungsfähig für eine Vielzahl von Motortypen und Einsatzprofilen ist.
Ein Frontend-Gleichrichter wandelt eingehendes AC in DC um. Die am häufigsten verwendete Umsetzung bei Dreiphasenversorgung ist eine 6-Diode-Brücke. Das ungefähre DC-Bus-Spannungsniveau ohne Last ist:
VDC ≈ 1.414 × VLL
Beispiele, die häufig in Feldmessungen zu sehen sind:
• 380 VAC Dreiphasen → ~537 VDC
• 220 VAC Einfachphase → ~311 VDC
Eine Diodebrücke ist einfach und zuverlässig, unterscheidet sich jedoch durch nicht-sinusförmigen Stromfluss von der Stromversorgung, was Harmonische erzeugen und den Stress auf schwache Stromsysteme erhöhen kann. In einigen Installationen können Probleme wie Fehlersperren, Transformatorüberhitzung oder instabiler Betrieb durch die Wechselwirkung zwischen harmonischen Strömen und Leitungsimpedanz verursacht werden, anstatt durch den Motor selbst.
Häufige Minderungsmöglichkeiten in industriellen Schaltanlagen:
• Linienreaktoren (AC-Drosseln)
• DC-Link-Drosseln
• EMI/RFI-Filter
Gleichrichteralternativen, die manchmal für spezifisches Verhalten ausgewählt werden:
• SCR (Thyristor) Gleichrichter für begrenztes kontrolliertes Laden (jetzt weniger häufig in Neubauten)
• Aktive Frontends (AFE), die IGBTs verwenden, um den Leistungsfaktor zu verbessern, harmonische Verzerrungen zu reduzieren und eine Rückspeisung ins Netz zu ermöglichen
Eine praktische Möglichkeit, die Entscheidung für den Gleichrichter zu formulieren, ist, dass sie definiert, wie der Antrieb mit dem Stromversorgungssystem zusammenarbeitet. Eine überraschend große Anzahl von Problemen, die zunächst Motoren zugeschrieben wurden, lässt sich auf die Kompatibilität der Eingangsseite und die Leitungsbedingungen zurückführen.
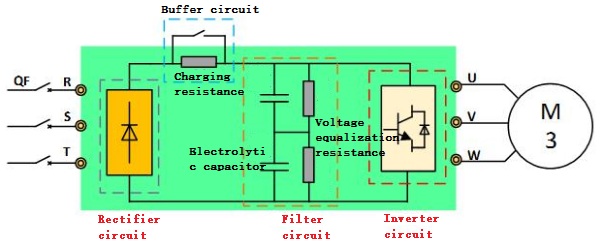
Bei der Elektrifizierung sehen die Gleichrichter-Gleichstrom-Link-Kondensatoren zunächst aus wie ein Kurzschluss. Ohne Einschaltstromsteuerung kann der Gleichrichter und der vorgelagerte Schutz einen abrupten Stromstoß erfahren, der sich wie ein harter Schlag auf das System anfühlt. Die meisten Antriebe lösen dies mit einem Vorladepfad, der den Strom während des Ladens des Busses begrenzt und dann in den normalen Betrieb übergeht.
Typische Elemente der Vorladung:
• Ein serieller Widerstand im Gleichstrombus während des Starts
• Ein Bypass- Kontaktor oder relais, der sich schließt, nachdem die Kondensatorspannung gestiegen ist
In echten Installationen treten Vorladefehler oft als intermittierende Startfehler, Ladezeitablaufalarme oder Kontaktor-Schwingen auf. Zu den häufigsten Ursachen gehören alternde Vorladewiderstände, abgenutzte Bypasskontakte und Unterspannungsbedingungen während des Starts, die den Antrieb daran hindern, den Ladevorgang korrekt abzuschließen.
Der DC-Link glättet die Gleichrichterwelligkeit und bietet kurzfristige Energiespeicherung, wenn die Last sich schneller ändert, als die Quelle reagieren kann. Er beinhaltet typischerweise mehrere Elemente, die jeweils eine andere Rolle spielen, anstatt einer einzigen „ein Teil löst alles“-Lösung.
Typische DC-Link-Komponenten:
• Elektrolytische Kondensatoren
• Entlade- und/oder Balancierwiderstände
• Manchmal Folienkondensatoren zur Unterdrückung hochfrequenter Welligkeit
Bei höheren Busspannungen können Kondensatoren in Serie geschaltet werden. Da echte Kondensatoren die Spannung nicht perfekt teilen, werden Balancierwiderstände hinzugefügt, um ungleichmäßige Spannungsverteilungen zu reduzieren, die die Alterung beschleunigen und einen Kondensator in einen frühen Ausfallmodus drängen können. Bei Servicearbeiten kann ein Antrieb weiterhin mit verringerter Kapazität betrieben werden, was trügerisch beruhigend sein kann; dann beginnt er, stärker auf Leitungsabsenkungen, Regenerationsereignisse oder schnelle Lastschritte zu reagieren. Diese Veränderung in der „Toleranz“ ist oft der erste Hinweis darauf, dass die Gesundheit des DC-Links nachlässt.
An vielen Standorten erreicht der DC-Link-Kondensatorensatz das Lebensende schneller als die IGBTs, nicht weil das Design schlecht ist, sondern weil Wärme- und Welligkeitsstress im Laufe der Zeit leise ansteigen. Dies ist der Grund, warum das Management des Luftstroms, die Herabstufung bei hohen Umgebungstemperaturen und gemäßigte Trägerfrequenzentscheidungen oft dazu beitragen, weniger unerklärliche Trips und weniger Umbauten des Antriebs in der Mitte der Lebensdauer zu haben.
Die Wechselrichterbrücke synthetisiert einen kontrollierten dreiphasigen Ausgang aus dem Gleichstrombus, häufig unter Verwendung von IGBTs, die mit PWM betrieben werden. Anti-parallele Dioden über den IGBTs bieten einen Strompfad während der Schaltübergänge und unterstützen die Stromkontinuität, wenn die Motorinduktivität „besteht“, dass der Strom fließt.
PWM ermöglicht eine präzise Steuerung, erzeugt jedoch auch schnelle Spannungskanten (hohes dV/dt). Eine Erhöhung der Schaltfrequenz (Trägerfrequenz) reduziert oft das hörbare Geräusch und die Stromwelligkeit, während sie den Schaltverlust und die interne Erwärmung erhöht. In der Praxis beinhalten die Einstellungen Kompromisse, die die Betreiber sofort spüren können, Ruhe auf der Motorebene gegen Temperaturspielraum im Inneren des Antriebs.
Häufige betriebliche Kompromisse:
• Niedrigere Trägerfrequenz: kühlerer Antrieb, mehr akustisches Geräusch und Drehmomentwelligkeit des Motors
• Höhere Trägerfrequenz: leiserer Motor, heißerer Antrieb, mehr Stress auf Komponenten über die Zeit
Kabellänge und Motoralter können die Anforderungen an den Ausgang in eine Richtung drücken, die Menschen überrascht, die nur auf die Nennleistung schauen. Lange Leitungen und ältere Isolationssysteme können von zusätzlichen Maßnahmen profitieren.
Häufige Zusätze und Praktiken auf der Ausgangsseite:
• dV/dt-Filter oder Sinusfilter
• Angemessene Erdung und abgeschirmte Kabelpraktiken zur Reduzierung von Lagerströmen und EMI-Problemen
Wenn ein Motor abbremst oder die Last den Motor antreibt (eine Überholungsbedingung), kann die Maschine Strom zurück in den Gleichstrombus erzeugen. Die Busspannung steigt, und der Antrieb muss diese Energie umleiten oder ableiten, um einen DC-Überstromtrip zu vermeiden. Dies ist eines dieser Verhaltensweisen, die zufällig erscheinen können, bis der Energiefluss klar betrachtet wird: Trägheit und Geschwindigkeitsprofilauswahl dominieren oft das Ergebnis.
Häufige Methoden zur Handhabung regenerativer Energie:
• Dynamisches Bremsen (Bremschopper + Widerstand): wandelt regenerierte Energie in Wärme um; weit verbreitet, da das Verhalten vorhersehbar und die Hardware unkompliziert ist
• Regenerative Frontend (AFE oder separate Regeneinheit): führt Energie zurück ins Netz; oft ausgewählt, wenn das Bremsen häufig ist oder wenn die Energierückgewinnung mit den Betriebszielen übereinstimmt
• Längere Abbremsrampen: reduziert die Spitzenregenerationsleistung; manchmal genug, um die Hinzufügung von Brems-Hardware zu vermeiden
Bei der Fehlersuche stoppen DC-Überspannungsabschaltungen oft, nachdem die Verzögerungszeit gelockert oder die Bremshardware an die tatsächliche Trägheit angepasst wurde. Was oft übersehen wird, ist, wie aggressiv das Geschwindigkeitsprofil im Verhältnis zur mechanischen Energie, die in der Last gespeichert ist, konfiguriert ist.
VFD-Steuerungen reichen von einfachen skalaren Ansätzen bis hin zu schnellen stromregulierten Methoden. Das „Gefühl“ der Maschine, insbesondere bei niedriger Geschwindigkeit oder während Lastwechsel, hängt stark davon ab, welche Steuerungsfamilie verwendet wird und wie gut das Motorenmodell der Realität entspricht.
V/Hz hält ein ungefähr konstantes Spannungs-zu-Frequenz-Verhältnis aufrecht. Es passt oft gut zu Ventilatoren und Pumpen, bei denen der Drehmomentbedarf recht vorhersehbar und die Dynamik modest ist. Wo es seine Grenzen zeigt, sind die Steifigkeit des Niedrigdrehmomentbereichs und die Reaktion bei plötzlichen Laständerungen, wo das System etwas vage oder verzögert wirken kann.
Vektorregelung (FOC) und DTC verwenden Strom-/Spannungsüberwachung und schnelle Berechnung (CPU/DSP), um fluxerzeugende und drehmomenterzeugende Stromkomponenten zu regeln. Das Ergebnis ist eine selbstsichererere Drehmomentreaktion, insbesondere nahe der Null-Speed und während schneller Transienten, und die Geschwindigkeitsregelung verbessert sich weiter, wenn eine encoderbasierte Rückmeldung verwendet wird.
Häufige Leistungsergebnisse, die mit diesen Methoden verbunden sind:
• Stärkeres Drehmomentverhalten bei niedrigen Geschwindigkeiten
• Schnellere Reaktion auf Laständerungen
• Engere Geschwindigkeitsregelung, insbesondere mit encoderbasierter Rückmeldung
In vielen Installationen hilft der Auto-Tune-Prozess, die Leistung zu verbessern, indem das Steuerungsmodell an die tatsächlichen elektrischen Eigenschaften des Motors angepasst wird, anstatt sich auf Standardparameterwerte zu verlassen. Dies führt oft zu einer genaueren und stabileren Motorsteuerung.
Ein VFD ändert mehr als nur die RPM. Es beeinflusst das thermische Verhalten des Motors, die mechanischen Lastmuster und die Qualität der Energieversorgung weiter, und diese Nebeneffekte treten oft erst auf, nachdem die Neuheit der variablen Geschwindigkeit nachlässt.
Häufig übersehene systemweite Auswirkungen:
• Motorenkühlung bei niedriger Geschwindigkeit: Wellenventilatoren bewegen weniger Luft; konstanter Drehmoment bei niedriger Geschwindigkeit kann einen separat betriebenen Gebläse oder einen für Umrichterbetrieb ausgelegten Motor erfordern
• Muster mechanischer Belastungen: Sanftere Beschleunigung kann Stoßbelastungen reduzieren, während aggressive Drehmomentgrenzen zu Riemenslip, Kupplungsstress oder Resonanz beitragen können
• Energiequalität: Diodenfronten führen zu Oberwellen; mehrere Antriebe auf einer gemeinsamen Quelle benötigen möglicherweise koordinierte Minderung
• Schutz und Sicherheit: Integrierte Fehlererkennung (Überstrom, Über-/Unterspannung, Übertemperatur, Erdschluss) und Funktionen wie Safe Torque Off (STO) ändern die Art und Weise, wie Systeme verdrahtet, validiert und gewartet werden
Stabile Ergebnisse werden selten erreicht, wenn alles auf Standard belassen wird und man hofft, dass der Prozess sanft ist. Vorhersehbarkeit kommt normalerweise aus einem kurzen, methodischen Einrichtungsrhythmus, der weniger dramatisch als heroische Fehlersuche ist, aber viel befriedigender, wenn die Maschine nach Schicht sauber läuft.
Eine Einrichtungscheckliste, die sich bei der Inbetriebnahme häufig auszahlt:
• Geben Sie genaue Motoren-Schilddaten ein (Spannung, Strom, Frequenz, Geschwindigkeit und Leistungsfaktor, wenn der Antrieb danach fragt)
• Wählen Sie einen Steuerungsmodus, der zum Lastprofil passt (Ventilator/Pumpe, konstant-drehmoment, oder hochdynamisch)
• Stellen Sie Beschleunigung / Verzögerung basierend auf Trägheit und Bremsfähigkeit ein, anstatt auf persönliche Vorlieben
• Wählen Sie eine Trägerfrequenz, die sowohl den Geräusch Erwartungen als auch den thermischen Spielraum berücksichtigt
• Überprüfen Sie Erdung, Kabeltyp und Kabel-Längenpraktiken, bevor Sie intermittierende oder „Phantom“-Fehler verfolgen
Ein produktives mentales Modell ist, den VFD als ein Energierouting-System mit drei verschiedenen Aufgaben zu betrachten: Eingangsleistung an der Netzseite gestalten, Energie im DC-Link puffern und Motorkurrent an der Ausgangsseite regeln. Wenn dieser Fluss im Blick behalten wird, werden wiederkehrende Probleme, DC-Überspannungsabschaltungen, schwaches Niedrigdrehmoment, Störfehler und vorzeitiger Altern von Komponenten tendenziell leichter erklärbar, testbar und korrigierbar.
Klassifizierung von VFDs
Nach Power-Stage-Architektur
VSI-Antriebe sind in Industiesystemen weit verbreitet, da die Topologie einfach und praktisch ist. Der Antrieb wandelt AC-Eingang in einen DC-Bus durch eine Diodenbrücke oder aktives Frontend um und verwendet dann einen Umrichter, um variabel frequente und variable Spannung für den Motor zu erzeugen. Große DC-Bus-Kondensatoren helfen dabei, eine stabile Spannungsversorgung aufrechtzuerhalten und Spannungsschwankungen zu reduzieren, die durch Laständerungen verursacht werden.
Bei der täglichen Startarbeit ist diese Architektur oft nachgiebig bei
häufigen variablen Drehmomentlasten wie Pumpen und Ventilatoren, weshalb sie häufig einen guten ersten Eindruck im Feld hinterlässt. Gleichzeitig kann die Kombination aus einem steifen Bus und schnellen Schaltkantend das dv/dt an den Motorklemmen erhöhen, und diese Realität wird schwer zu ignorieren, wenn die Motorleitungen lang werden oder wenn ältere Isolationssysteme bereits auf geliehenem Zeit leben.
Häufige Details zur Inbetriebnahme, die regelmäßig entscheiden, ob eine VSI-Installation sauber oder unordentlich wirkt:
• Kabellänge und -verlegung des Motors
• Erdungsmethode und Qualität der Verbindung
• dv/dt oder Sinusfilterstrategie
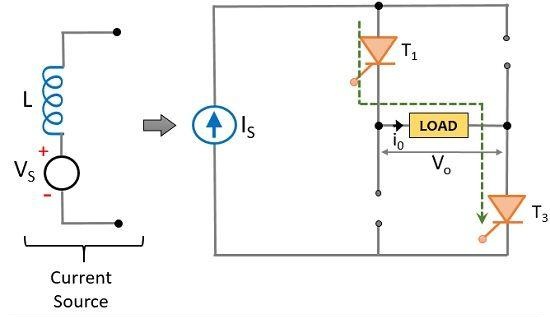
CSI-Antriebe nehmen eine andere Haltung ein: Eine große Induktivität in der DC-Link-Leitung drängt das System auf einen relativ konstanten Gleichstrom, und die Ausgangsstufe formt den Motorstrom entsprechend. Sie werden heute seltener spezifiziert, tauchen jedoch weiterhin in Hochleistungs-, Mittelspannungs- und robusten Anwendungen auf, wo kontrolliertes Stromverhalten zum Risikoprofil und zur Betriebskultur der Anlage passt.
In der Praxis neigt CSI dazu, Komfort gegen Vorhersehbarkeit einzutauschen. Der Hardware-Fußabdruck ist größer, der Konfigurationsraum kann enger wirken, und das Ökosystem aus leicht verfügbaren Teilen und Technikern ist kleiner als das, was die meisten Teams bei VSI erwarten. Dennoch kann das stabilere Stromverhalten für Anwendungen, die mit den Stärken von CSI übereinstimmen, beruhigend erscheinen, insbesondere wenn der Standort konservative elektrische Belastungen und langlebigen Betrieb über Kompaktheit schätzt.
Typische CSI-Abwägungen, die reale Projekte beeinflussen:
• Größere physische Größe und höhere Systemkomplexität
• Weniger gängige Serviceoptionen und Ersatzteile
• Starke Übereinstimmung mit bestimmten MV- und schweren Einsatzfällen
Diskussionen über Antriebe widmen sich oft dem Wechselrichter, aber die Vorderseite entscheidet häufig darüber, wie sich das System im Anlagenbus und während des Bremsens verhält. Eine Diodenvorderseite ist einfach und budgetfreundlich, aber sie zieht nicht-sinusoidalen Eingangsstrom und kann typischerweise keine Energie ins Netz zurückspeisen. Ein AFE kann den Eingangsleistungsfaktor verbessern, Oberwellen reduzieren und die Regeneration unterstützen.
Diese Unterscheidung wird schmerzlich offensichtlich in Prozessen mit häufigen Verzögerungen oder überholenden Lasten. Wenn eine Maschine während schneller Stops wiederholt wegen Gleichstrombus-Überspannung ausfällt, ist es verlockend, die Abstimmung zu beschuldigen, aber die unangenehme Wahrheit ist oft ein Missverhältnis in der Energiehandhabung: Energie kommt schneller zurück, als das System sie absorbieren oder zurückgeben kann.
An der Vorderseite und bei Energiehandhabungsoptionen, die häufig im Feld gewählt werden:
• Diodenvorderseite
• Aktive Vorderseite
• Bremswiderstand / dynamischer Brechschirm
• Regenerative Einheit oder gemeinsame DC-Bus-Lösungen
• Längere Verzögerungsrampe, die mit der Prozess-Toleranz übereinstimmt
Klassifikation nach Schalt- und Modulationsmethode
Ältere Antriebe verlassen sich manchmal auf PAM oder frühere Modulationsstrategien, die mit älteren Leistungsgeräten und Steuerungshardware verbunden sind. Diese Systeme erscheinen immer noch in langlebigen Geräten und können zuverlässig betrieben werden, bis der Lebenszyklus-Support sich wie ein Ratespiel anfühlt. Im Vergleich zu modernen PWM-Ansätzen liegen sie in der Regel in Effizienz, akustischem Verhalten und Steuerbarkeit zurück.
Aus der Wartungsperspektive ist der emotionale "Druckpunkt" selten die Leistung, sondern die Unsicherheit. Wenn Ersatzteile rar werden und die Dokumentation dünn ist, konzentriert sich die Modernisierungsplanung häufig auf den Übergang zu zeitgenössischen PWM-Antrieben, während bestehende Motoren, Verkabelungen und Prozessbeschränkungen respektiert werden.
PWM ist der moderne Standard, weil er flexible Kontrolle über Spannung und Frequenz bietet und die Steuerungsmodi unterstützt, die die meisten Teams heute erwarten. Raummodulations-PWM wird häufig verwendet, da sie die DC-Bus-Nutzung verbessert und die harmonische Verzerrung im Motorstrom reduzieren kann.
Ein operatives Detail, das erfahrene Techniker demütig behandeln lernen, ist, dass die Qualität der PWM-Wellenform immer mit Kosten verbunden ist. Sauberer Strom erfordert typischerweise mehr Schaltvorgänge, und das erhöht die Schaltverluste und die thermische Belastung. Die besten Ergebnisse ergeben sich in der Regel aus dem Ausbalancieren der Trägerschwingungsfrequenz, der thermischen Toleranz und der Hörgeräuschziele, anstatt einem einzigen besten Drehknopf-Einstellung nachzujagen.
Häufige PWM-Konfigurationshebel, die routinemäßig gegeneinander abgewogen werden:
• Trägerschwingungsfrequenz
• Thermische Toleranz und Kühlkörper-/Lüfterkapazität
• Erwartungen an hörbare Geräusche
• Motorstromwelligkeit und Toleranz für Drehmomentwelligkeit
Eine erhöhte Trägerschwingungsfrequenz reduziert oft die Stromwelligkeit und kann das Schaltgeräusch über den empfindlichsten hörbaren Bereich verschieben. In belegten Räumen kann sich diese Änderung wie eine Erleichterung anfühlen, und in bestimmten Maschinen verbessert sie direkt die wahrgenommene Produktqualität.
Die Einschränkung ist das Wärmemanagement. Höhere Schaltfrequenzen erhöhen die Umrichterverluste, und das kann den Antrieb zur Herabsetzung, zu einer stärkeren Gehäusebelüftung oder zu einer größeren Baugröße drängen. Viele Feldbeschwerden, die als „mysteriöse Überhitzung“ erscheinen, werden viel weniger mysteriös, sobald die Trägerschwingungsfrequenz, die Umgebungstemperatur, die Gehäusebeschränkung und der Betriebszyklus zusammen bewertet werden.
Wärmerelatierte Maßnahmen, die häufig zur Stabilisierung von Hochfrequenzeinstellungen verwendet werden:
• Trägerschwingungsfrequenz auf ein realistisches Niveau für den Betriebszyklus reduzieren
• Ausgabestrom herabsetzen und Überlasterwartungen überarbeiten
• Verbesserung der Gehäusebelüftung oder des Wärmeabfuhrwegs
• Wechsel zu einer größeren Antriebseinheit
Mittelspannungs-VFDs verwenden häufig Multilevel-Inverter-Topologien, um Spannungssprünge zu reduzieren und die Wellenformqualität zu verbessern. Breitbandlücken-Elemente wie SiC und GaN können schneller und effizienter schalten, was sich wie ein technischer Gewinn anfühlen kann, bis schnelle Ränder dv/dt-Stress und elektromagnetische Störungen in Layouts erhöhen, die nicht mit Disziplin ausgeführt werden.
Eine pragmatische Sichtweise ist, dass schnelleres Schalten die Steuerbarkeit verbessern kann, während gleichzeitig die Installationsdetails sichtbarer werden. Wenn Motorlager frühzeitigen Verschleiß zeigen oder wenn Sensoren anfällig für Störungen werden, ist die Ursache häufig die common-mode Spannung und die Verdrahtungs-/Erdpraktiken, und nicht ein Mangel am Steuerungsalgorithmus.
Installations- und Minderungsmaßnahmen, die häufig die Ergebnisse bei schnellen Rändern bestimmen:
• Auswahl und Abschirmung des Motorkabels
• Erdungs- und Bindungs-Topologie
• Ausgabe-dv/dt-Filter oder Sinusfilter
• Maßnahmen zur Minderung von Lagestrom
• EMI-bewusstes Layout und Trennung von Signal-/Stromverdrahtung
Klassifizierung nach Steuerungsphilosophie
V/Hz-Steuerung hält ein Verhältnis von Spannung zu Frequenz aufrecht, das den Motorfluss in einem brauchbaren Bereich hält. Sie ist einfach, in vielen Installationen stabil und wird häufig bei variablen Drehmomentlasten wie Ventilatoren und Zentrifugenpumpen eingesetzt.
Diese Methode zeigt ihre Stärken, wenn der Prozess keine enge Drehmomentsteuerung bei sehr niedriger Drehzahl verlangt. In der Praxis gelingt es oft, weil sie den Abstimmungsaufwand reduziert und die Wahrscheinlichkeit von Oszillationen verringert, die durch falsche Motorparameter verursacht werden. Der Kompromiss ist eine bescheidene dynamische Reaktion, insbesondere bei schnellen Lastwechseln, wo der Prozess fordert und der Antrieb einen Schlag später reagiert.
Vektorkontrolle trennt Drehmoment-erzeugende und fluss-erzeugende Komponenten durch Schätzen oder Messen von Motorzuständen. Sensorlose Vektorkontrolle kann beeindruckend ohne einen Encoder arbeiten, ist jedoch stark auf genaue Motorinformationen und vernünftig stabile Betriebsbedingungen angewiesen. Geschlossene Schleifen-Vektorkontrolle fügt einen Encoder oder Resolver hinzu, wodurch typischerweise das Verhalten, die Genauigkeit und die transienten Reaktionen bei niedrigen Geschwindigkeiten verbessert werden.
In der Praxis liegen viele Vektorkontrollprobleme eher an Parametern als an der Theorie. Die Angaben auf dem Typenschild sind oft ein Ausgangspunkt, nicht eine Ziellinie. Ein kurzer Identifikationslauf, sinnvolle Auswahl der Grundfrequenz und realistische Stromgrenzen verwandeln oft einen Antrieb, der sich weich anfühlt, in einen, der Geschwindigkeit und Drehmoment auf eine Weise hält, der die Betreiber vertrauen können.
Vektorkontroll-Setup-Elemente, die häufig die Leistung bestimmen:
• Überprüfte Daten vom Motornamefeld
• Motor-ID / Autotune-Ergebnisse und deren Plausibilität
• Auswahl der Grundfrequenz, die mit dem Motorentwurf übereinstimmt
• Stromgrenzen und Drehmomentgrenzen, die mit der Mechanik übereinstimmen
DTC regelt Drehmoment und Fluss direkter, wodurch eine sehr schnelle Drehmomentreaktion in Anwendungen mit scharfen Transienten und anspruchsvollem Drehmomentverhalten ermöglicht wird.
Der Entscheidungspunkt ist selten nur die Geschwindigkeit der Reaktion; es ist, wie das mechanische System diese Reaktion toleriert. Ein Antrieb, der das Drehmoment fast sofort ändern kann, kann auch Resonanzen anregen, wenn Rampen und Grenzen aggressiv eingestellt sind. Die robustesten Setups behandeln den Motor, die Kupplung, das Getriebe und die Last als ein verknüpftes System und gestalten dann die Beschleunigungsprofile und Drehmomentgrenzen so, dass sie dem entsprechen, was die Mechanik ohne Protest aufnehmen kann.
Anwendungsgetriebene Kategorien
Allgemeine Antriebe betonen breite Kompatibilität und kostengünstige Merkmale. Hochleistungsantriebe bieten typischerweise eine genauere Stromkontrolle, reichhaltigere Rückmeldungen und I/O-Optionen, höhere Überlastkapazität und fortgeschrittenere Diagnosen.
Eine Einsicht in der Auswahl, die sich in realen Projekten wiederholt, ist, dass sich hochleistungsfähige Funktionen am meisten auszahlen, wenn der Prozess Wiederholgenauigkeit unter Störungen fordert, nicht nur, wenn die Motorbewertung hoch ist. Viele große Ventilationssysteme laufen reibungslos mit allgemeinen V/Hz, während kleinere Systeme für Spannungsregelung, Indizierung oder enge Geschwindigkeitsregelung oft von der Vektorkontrolle und Rückmeldungsfähigkeit profitieren.
Typische Trennungen zwischen Antriebsklassen in Beschaffungsdiskussionen:
• Überlastfähigkeit und Komplexität des thermischen Modells
• Unterstützung für Rückgabegeräte (Encoder/Resolver)
• Diagnosetiefe und Trace-/Monitor-Tools
• I/O-Flexibilität und Integrationsfunktionen
Spindelanwendungen erfordern hohe elektrische Frequenzfähigkeit, stabile Geschwindigkeitsregelung und durchdachte Handhabung der Motorerwärmung bei erhöhten Umdrehungen. Diese Antriebe betonen oft die schnelle Schaltleistung und spezialisierte Motorschutzfunktionen, die auf Spindeln zugeschnitten sind.
In der Praxis verläuft die Auswahl des Antriebs tendenziell reibungsloser, wenn sie das Isolationssystem und die Lagerstrategie des Spindelmotors respektiert, anstatt sich eng auf die Höchstgeschwindigkeit zu konzentrieren. Wenn Spindeln frühzeitig ausfallen, ist die Ursache oft das thermische Management, die Schmierung oder elektrische Lagerströme – Probleme, die frustrierend sein können, weil sie sich als Steuerungsprobleme tarnen.
Spindelbezogene Ingenieursprüfungen, die häufig unangenehme Überraschungen verhindern:
• Eignung der Motorisolierung für schnelle Kanten und hohe Frequenzen
• Ansatz zur Minderung von Lagerströmen
• Thermische Grenzen im vorgesehenen Geschwindigkeitsbereich
• Kühlungs- und Schmierungsvoraussetzungen unter realen Lastzyklen
Einkanalige Eingangsantriebe sind in leichten industriellen und gewerblichen Umgebungen üblich, werden jedoch oft herabgestuft, da der Eingangsstrom für die gleiche Ausgangsleistung steigt. Dreiphasige Eingänge verteilen den Eingangsstrom typischerweise gleichmäßiger und skalieren komfortabler mit steigendem Strom.
Ein praktisches Installationsdetail ist die Kapazitätsplanung im Vorfeld. Störende Auslösungen und überhitzte Verkabelungen werden häufig auf die Unterschätzung des einkanaligen Eingangsstroms, das Übersehen des Anlaufverhaltens oder das Ignorieren der Wechselwirkungen von Harmonischen mit Schutzvorrichtungen zurückgeführt.
Übergeordnete Überlegungen, die häufig die Installationsergebnisse beeinflussen:
• Dimensionierung des Leitungsschutzschalters/Sicherung und Auswahl der Auslösekennlinie
• Dimensionierung von Leitern und Temperaturerhöhung in der Leitung/Kanal
• Anlauf- und Vorspannverhalten
• Harmonischer Einfluss auf Schutz und vorgelagerte Geräte
Funktionale Terminologie
Bei den meisten Wechselstrommotoren stammt das nutzbare Drehmoment über einen Geschwindigkeitsbereich aus der Koordination von Spannung und Frequenz. Diese Koordination steht im Mittelpunkt dessen, was ein VFD tut, auch wenn die Steuerungsmethode komplex ist. Die zugrunde liegende Einschränkung bleibt dieselbe: Der Motorfluss muss innerhalb angemessener Grenzen bleiben, um schwaches Drehmoment auf der einen Seite und Überhitzung auf der anderen zu vermeiden.
Eine bodenständige Weise, "VVVF" zu interpretieren, ist als Erinnerung an die Physik des Motors und nicht als Markenlabel. Bei der Fehlersuche nach schwachem Drehmoment oder unerwarteter Erwärmung kommt Klarheit häufig schnell durch die Überprüfung, ob die angegebene Spannung, die angegebene Frequenz und die Stromgrenzen tatsächlich dem Betriebsbereich und der Lastanforderung des Motors entsprechen.
CVCF beschreibt regulierte Energiequellen, die Spannung und Frequenz konstant halten, ähnlich wie bei der Lieferung durch ein Versorgungsunternehmen. Dieses Modell ist nicht darauf ausgelegt, die Motordrehzahl zu ändern.
Wenn das Ziel die Geschwindigkeitsregelung ist, neigt CVCF dazu, das Denken in die falsche Richtung zu lenken. Die Geschwindigkeitsregelung basiert auf variabler Frequenz, und ein stabiles Drehmomentverhalten folgt normalerweise, wenn die Spannung synchron zur Frequenz innerhalb der Grenzen des Motors und der Anwendung verwaltet wird.
Steuerungsmodi für Niederspannungs-VFDs

Warum der Steuerungsmodus noch immer die realen Ergebnisse in modernen Niederspannungsantrieben prägt
Moderne Niederspannungs-VFDs für allgemeine Zwecke (typischerweise 380–690 VAC-Klasse, etwa 0,75–400 kW, mit 0–400 Hz Ausgang) sehen häufig aus hardwaretechnischer Sicht ähnlich aus, was die Teams dazu verleiten kann, ähnliches Verhalten in der Maschine zu erwarten. Im Feld zeigt sich der Unterschied schnell: Der Steuerungsmodus diktiert weitgehend, wie sich der Antrieb anfühlt, wenn der Prozess chaotisch wird, kalte Starts, Lastsprünge, lange Kabel, marginale Motoren und Betreiber, die das Tuning nicht betreuen.
Was die Steuerungsstrategie letztendlich beeinflusst, ist nicht abstrakt; es wird zu einer Reihe von Alltagsmerkmalen, die die Wartung und die Produktion bemerken.
Niedrigdrehmomentfähigkeit; Genauigkeit der Drehzahlhaltung; transiente Reaktion auf Lastsprünge; akustisches Geräusch; harmonische Verzerrung; Motorerwärmung/thermischer Stress; Empfindlichkeit gegenüber Parameterdrift; Empfindlichkeit gegenüber der Qualität der Inbetriebnahme.
In der Praxis ist der beste Betriebsmodus normalerweise derjenige, der die Drehmoment- und Reaktionsanforderungen erfüllt und gleichzeitig stabil bei Temperaturänderungen, Lastvariationen und nicht idealen Betriebsbedingungen bleibt. Modi, die nur während Demonstrationen gut abschneiden, können später Probleme verursachen, wenn ständige Neukalibrierungen, Geräuschbeschwerden oder instabiles Verhalten nach einem Motorwechsel oder Systemänderungen auftreten.
Generation 1: SPWM mit festem V/Hz (Skalare Steuerung)
Die skalare Steuerung hält ein annähernd konstantes V/Hz-Verhältnis, sodass der Luftspaltfluss des Motors in der Nähe eines gewünschten Niveaus bleibt, während sich die Frequenz ändert. Mit sinusoidal moduliertem Pulsweitenmodulationssignal (SPWM) ist die Implementierung unkompliziert, das Kostenprofil ist vorteilhaft und das Verhalten ist normalerweise stabil, wenn die Last gleichmäßig ist und der nutzbare Geschwindigkeitsbereich nicht extrem ist.
Bei niedrigen Frequenzen ist die befehlsmäßige Statorspannung von Natur aus gering. Das führt dazu, dass der Statorwiderstandsverlust (I·Rs) im Verhältnis zur angelegten Spannung übermäßig groß wird, sodass der Fluss unter das beabsichtigte Niveau fällt. Das Ergebnis ist nicht subtil: Die Drehmomentfähigkeit nimmt ab, der Motor kann unter Last stehen bleiben, und einige Maschinen entwickeln ein unangenehmes „Ruckeln“ oder Oszillationen, die von den Bedienern als mechanische Probleme interpretiert werden.
Zwei zusätzliche Effekte erhöhen oft die Frustration bei nahezu Nullgeschwindigkeit: Todzeiten des Wechselrichters und Spannungsverluste in Halbleitern. Diese Verluste reduzieren die effektive Spannung an den Motoranschlüssen weiter, was ein Grund dafür ist, dass zwei Antriebe mit der gleichen kW-Nennleistung während des Kriechens und Positionierens merklich unterschiedlich reagieren können.
Installationen, die beim skalaren Steuerungssystem bleiben, aber trotzdem ein akzeptables Verhalten bei niedrigen Geschwindigkeiten wünschen, stapeln typischerweise mehrere pragmatische Anpassungen. Jede einzelne kann helfen, und jede kann auch einen neuen Fehlerzustand schaffen, wenn sie zu stark gedrückt wird.
• Spannungsanhebung / IR-Kompensation: fügt zusätzliche Niedrigfrequenzspannung hinzu, um I·Rs auszugleichen; verbessert das Anfahrmoment, aber aggressive Einstellungen können den Motor überfluten und die Erwärmung erhöhen.
• Schlupfk compensation: fügt Frequenz als Funktion des Laststroms hinzu, um die Geschwindigkeitsabnahme des Induktionsmotors zu verringern; kann Förderanlagen und Mischer straffen, kann jedoch Jagdverhalten hervorrufen, wenn die Mechanik elastisch oder das Stromfeedback rauschend ist.
• Mehrpunkt-V/f-Kurven: verwendet stückweise V/f-Formungen anstelle einer einzigen Geraden; kann einen problematischen Geschwindigkeitsbereich beeinflussen, während es an anderen Stellen wenig bewirkt.
• +Rampenanpassung und Stromgrenzen: passt Beschleunigungs-/Verzögerungsverhalten an und begrenzt; verhindert häufig lästige Auslösungen bei Antrieben mit hoher Trägheit zuverlässiger als ein einzelner „magischer“ Kompensationsregler.
Wenn die Anwendung starkes Drehmoment bei sehr niedriger Geschwindigkeit, häufige Rückwärtsbewegungen oder präzise Drehmomentbegrenzung wünscht, neigt die skalare Steuerung dazu, sich zu einem Zyklus kleiner Verbesserungen zu entwickeln, die sich nie ganz fertig anfühlen. Die Maschine könnte nach dem Warmup und stabiler Last akzeptabel laufen, könnte dann jedoch nach Temperaturänderungen, Motorwechseln oder Kabellängenänderungen die Kontrolle verlieren, genau die Art von Variabilität, die Techniker dazu bringt, der Einrichtung misstrauisch zu werden, auch wenn sie auf Papier gut aussieht.
Generation 2: SVPWM mit verbesserter skalare Steuerung
Space Vector PWM (SVPWM) nutzt Wechselrichter-Schaltvektoren effizienter als traditionelles SPWM. Das praktische Ergebnis ist eine höhere Nutzung des Gleichstrombusses und eine geringere harmonische Verzerrung bei derselben Hardware, was typischerweise in mehr nutzbarer Grundspannung, gleichmäßigeren Strömen und oft weniger Motorgeräuschen und Erwärmung resultiert.
Wenn SVPWM mit Stromfeedback plus Niedriggeschwindigkeits-Spannungs-/Flusskompensation kombiniert wird, fühlen sich viele skalare Antriebe bei niedrigen Geschwindigkeiten weniger „weich“ an und halten die Geschwindigkeit überzeugender unter moderaten Laständerungen. Für Teams, die ein besseres Verhalten wünschen, ohne die Inbetriebnahmekultur zu ändern, kann diese inkrementelle Verbesserung wirklich ansprechend sein.
Selbst mit SVPWM entkoppelt die skalare Steuerung Fluss und Drehmoment nicht wirklich. Die Drehmomentreaktion ist immer noch durch die indirekte Beziehung zwischen Spannung, Fluss und Schlupf vermittelt. Unter dynamischen Anforderungen reagiert der Antrieb oft, nachdem sich der Motorzustand bereits geändert hat, was dazu neigt, langsamer zu wirken als Ansätze, die das Drehmoment direkt regeln. Deshalb wird SVPWM-verbesserte skalare Steuerung oft als Verfeinerung anstelle eines Sprungs für leistungsstarke Bewegungen wahrgenommen.
SVPWM kann messbare Gewinne erzielen, selbst wenn sich nichts anderes ändert, aber die größeren Verbesserungen zeigen sich normalerweise erst nach der Überprüfung der grundlegenden Einstellungen, die die Leute verständlicherweise während eines Starts hastig durchgehen.
Einstellungen, die oft entscheiden, ob SVPWM in der Produktion erscheint:
• Basisfrequenz
• Motornameplate-Daten
• Minimale Frequenz
• Spannungs-/IR-Kompensation
• Stromgrenzen.
Viele Beschwerden, die als „Instabilität bei niedriger Geschwindigkeit“ bezeichnet werden, führen auf konservative Stromgrenzen oder falsche Motorparameter zurück, statt auf die PWM-Methode selbst, was während der Fehlersuche eine demütigende Entdeckung sein kann.
Generation 3: Vektorsteuerung
Was FOC hinzufügt: separate Handgriffe für Drehmoment und Fluss
Vektorsteuerung wandelt gemessene Phasenströme in ein rotierendes Referenzsystem um, sodass flussproduzierender Strom und drehmomentproduzierender Strom unabhängig geregelt werden können, in einer Art und Weise, die der Regelbarkeit von Gleichstrommotoren ähnelt. In dieser Phase ändert sich die Motorsteuerung von einfachem Anpassungsverhalten zu direkter und präziser Ansteuerung. Der Vorteil ist ein stärkeres Drehmoment bei niedrigen Geschwindigkeiten und eine schnellere Reaktion, da das Drehmoment eine direkt verwaltbare Variable wird, anstatt ein Nebeneffekt des Schlupfs zu sein.
Ohne Sensor vs. Geschlossener Regelkreis Vektor: Ein Unterschied, den man an der Maschine spürt
• Sensorlose Vektorkontrolle: schätzt die Rotorposition/den Fluss unter Verwendung von Spannung, Strom und einem Motormodell; reduziert Verkabelung und Kosten; wird häufig in der allgemeinen Industrie eingesetzt; hat oft Probleme bei niedriger Geschwindigkeit, da die Rück-EMK gering ist und Modellfehler überproportional einflussreich werden.
• Geschlossene Regelung der Vektorkontrolle: verwendet einen Encoder oder Resolver; liefert konsistentes Drehmoment bei Nullgeschwindigkeit und wiederholbare Dynamik; wird oft für Winden, Aufzüge und präzise Bewegungen gewählt; kann die Inbetriebnahme weniger nervenaufreibend gestalten, wenn die Mechanik empfindlich auf Drehmomentwelligkeit reagiert.
Parameteraempfindlichkeit: Der Handel, mit dem Sie nach dem Start leben
Die Vektorleistung hängt stark von den Motorparametern und der Flussschätzung ab. Verschiedene Effekte können diese Parameter während des normalen Betriebs still verschieben, und der Antrieb wird nur so sicher sein wie sein Modell.
Quellen von Driften und Unstimmigkeiten, die häufig in der Produktion auftreten.
• Drift der Rotor-Zeitkonstante
• Temperaturbedingte Veränderung des Statorwiderstands
• Magnetische Sättigung bei höherer Last
• Impedanz langer Motorkabel und EMI-Effekte
Ein häufiges Symptommuster erscheint, wenn das System im kalten und leicht belasteten Zustand reibungslos arbeitet, dann aber bei hoher Temperatur oder hoher Last weniger stabil, lauter oder inkonsistent wird. Diese Situationen führen oft entweder zu einem Misstrauen gegenüber der Vektorkontrolle oder zu strengeren Abstimmungs- und Parameteridentifikationspraktiken.
Abstimmpraktiken, die normalerweise ruhigere Installationen ergeben
Stabile Vektorinstallationen teilen oft einige Gewohnheiten, die nicht glamourös klingen, aber lange Debugging-Sitzungen später verhindern.
• Validieren Sie die Motordaten unter realen Verkabelungsbedingungen: Kabellänge, Ausgangsreaktoren, Erdung und Installationslayout beeinflussen die Schätzung und EMI auf eine Weise, die die Einstellungen im Labor selten erfassen können.
• Verwenden Sie rotierendes Autotuning, wenn erlaubt: statisches Tuning kann für Lüfter und Pumpen in Ordnung sein, aber hochdrehmomentige, niedertourige Aufgaben profitieren oft von rotierender Identifikation.
• Passen Sie die Steuerbandbreite an die Mechanik an: zu aggressive Drehmomentregelungen können Kupplungen, Spiel und Resonanzen anregen; leicht langsameres, aber gut gedämpftes Verhalten führt oft zu höherem Durchsatz und weniger Fehltrips.
Eine praktische Regel zur Wahl des Modus, ohne darüber nachzudenken
Wenn der Prozess empfindlich auf Drehmoment bei niedriger Geschwindigkeit reagiert oder eine schnelle Erholung von Lastschritten erwartet, reduziert die Vektorkontrolle oft die Anzahl unangenehmer Überraschungen später, auch wenn der Einrichtungsaufwand steigt. Wenn der Prozess Geschwindigkeitsabfall toleriert und selten nahe Nullgeschwindigkeit arbeitet, liefern skalare Modi oft stabileres Verhalten im täglichen Betrieb mit weniger Drehknöpfen, die falsch eingestellt werden können.
Generation 4: DTC (Direkte Drehmomentregelung)
Die direkte Drehmomentregelung schätzt den Statorfluss und das Drehmoment im Stator-Referenzrahmen und wählt die Schaltzustände des Inverters aus, um Fluss und Drehmoment innerhalb der Hysteresebänder zu halten. Da es einige der typischen geschachtelten Schleifenstrukturen von FOC-Implementierungen vermeidet, kann es eine sehr schnelle Drehmomentreaktion und starke Störfallabweisung liefern. In Anwendungen, in denen Betreiber jeden Drehmomentabfall als Produktfehler oder Prozessstörung bemerken, kann diese Reaktionsfähigkeit beruhigender sein als eine schön glatte Wellenform.
Häufig beobachtete Vorteile.
• Schnelle Drehmomentreaktion bei plötzlichen Lastwechseln
• Starkes Drehmoment bei niedriger Geschwindigkeit, wenn die Schätzung zuverlässig bleibt
• Eine vergleichsweise direkte Struktur, die sich bei höheren Leistungsstufen robust verhalten kann.
Kosten und Einschränkungen, die Planung erfordern.
• Drehmomentwelligkeit und variable Schaltfrequenz
• Das Hystereseverhalten kann hörbare Geräusche und Drehmomentpulsschwankungen erzeugen, die in Niedriginertials oder Präzisionssystemen hervortreten.
EMI- und thermische Entwurfs-komplexität: Variable Schaltung erschwert das Design von Filtern und kann die Motorakustik verschlechtern, wenn sie nicht verwaltet wird.
Abhängigkeit von der Schätzqualität: Schwächen des Beobachters in der Nähe von Nullgeschwindigkeit können auftreten, ähnlich wie bei der sensorlosen Vektorkontrolle, obwohl die Implementierungen je nach Anbieter stark variieren.
DTC glänzt oft, wenn Drehmomenttransienten wichtiger sind als ultra-glattes Drehmoment und wo das Antriebs-/Motor-Paar mit dieser Erwartung dimensioniert und integriert ist. In der Schwerindustrie geht es häufig weniger um Spitzenwerte und mehr darum, sich von Störungen auf eine Weise zu erholen, die konsistent bleibt, ohne fragile Abstimmung.
Generation 5: Matrix-AC-AC-Umwandlung
Ein Matrixumrichter wandelt AC-Eingang direkt in AC-Ausgang um, ohne einen großen Gleichstromkondensatorspeicher. Das ändert den Charakter des Systems: Es kann den Eingang Wirkungsgrad verbessern, sperrige Energiespeicherkapazitäten reduzieren und einen von Natur aus bidirektionalen Energiefluss ermöglichen. Gleichzeitig ändert es die Modulationsbeschränkungen, Schutzmethoden und Kommutierungsanforderungen, was tendenziell die Koordinationslast zwischen Steuerungs- und Leistungshardware erhöht.
Die Matrixumwandlung erfordert sorgfältig abgestimmte Kommutierung, um Kurzschlüsse zwischen den Eingangsphasen zu vermeiden oder induktive Strompfade nicht zu unterbrechen. Stabiles sensorloses Verhalten und starkes Drehmoment bei niedrigen Geschwindigkeiten erfordern typischerweise hochgenaue Beobachter (Fluss, Drehmoment, manchmal Geschwindigkeit), schnelle Echtzeitberechnungen und komplexe Modulationen, die PWM mit hysteresetypischer Entscheidungslogik kombinieren können. Wenn es gut gemacht wird, kann die Drehmomentreaktion Millisekundenverhalten erreichen, aber der Ingenieur-Spielraum ist oft enger als bei herkömmlichen Spannungsquellenwechselrichtern (VSI), was Teams vorsichtig machen kann, es sei denn, die Vorteile überwiegen eindeutig die zusätzliche Komplexität.
• Einschränkungen des Spannungsübertragungsverhältnisses: Die praktische maximale Ausgangsspannung ist im Verhältnis zum Eingang begrenzt, was den hochdynamischen Drehmomentbereich verringern kann, es sei denn, das System ist entsprechend ausgelegt.
• EMV und Filterung: Das Entfernen der Gleichstromverbindung verlagert die Filterlast und kann die Einhaltung in elektrisch lauten Umgebungen komplizieren.
• Zuverlässigkeitstrade-offs: Das Entfernen von Elektrolytkondensatoren kann die Lebensdauer in einigen Arbeitsprofilen verbessern, aber der Wandler führt komplexere Schalt- und Schutzanforderungen ein, die den Ort verschieben, an dem Ausfälle auftreten können.
Matrixwandler sind typischerweise gerechtfertigt, wenn bidirektionaler Energiefluss, Kompaktheit oder Bedenken hinsichtlich der Lebensdauer von Kondensatoren dominieren und wenn der Standort die Ingenieurs- und Wartungsanforderungen umsetzen kann, die folgen. Sie sind schwerer zu rechtfertigen, wenn die Prioritäten eher auf schneller Bereitstellung, breiter Servicevertrautheit oder hoher Toleranz gegenüber Parameterunsicherheiten und "ausreichend guten" Motorspezifikationen liegen.
Über diese Generationen hinweg bleibt das Muster konsistent: Die Leistung verbessert sich, während Drehmoment und Fluss von emergentem Verhalten zu explizit regulierten Variablen übergehen. Der Tausch besteht darin, dass jeder Schritt nach oben tendenziell mehr auf Modelle, Sensorqualität, Inbetriebnah disziplin und mechanische Kompatibilität angewiesen ist. Ein theoretisch stärkerer Antrieb kann dennoch unterdurchschnittlich abschneiden, wenn die Motorinformationen falsch sind, wenn das mechanische System die Welligkeit verstärkt oder wenn der Betrieb Zeit in einem schwachen Bereich des Beobachters verbringt.
Eigenschaften eines VFD
VFDs verdienen ihren Ruf in gemessenem Verhalten, nicht in Broschürensprache. Was in der Regel die Debatte beilegt, oft nach ein paar langen Startvormittagen vor einem Panel, ist, wie konsistent der Antrieb die Motorantwort während des Starts, bei Geschwindigkeitsänderungen und im Teillastbetrieb verändert. Das sind die Momente, in denen herkömmliche Ansätze häufig Energie, Geschmeidigkeit oder Lebensdauer der Ausrüstung abtauschten.
In der täglichen Ingenieurarbeit sind die Ergebnisse wiederholbarer, wenn elektrische Leistung und Prozess erwartungen als ein einziger Entwurfstrang (Grenzen des Energiesystems, thermische Grenzen des Motors und Prozessdynamiken zusammengeführt) behandelt werden, anstatt als zwei parallele Checklisten, die sich nur bei der Inbetriebnahme treffen.
Sanfter Start und geringerer elektrischer/mechanischer Stress
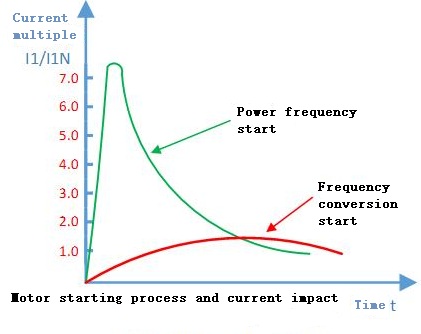
Ein definierendes Merkmal eines VFD ist die kontrollierte Beschleunigung, die durch die Koordinierung von Spannung und Frequenz während des Anstiegs implementiert wird. Bei einem Direktstart erfolgt der Anlaufstrom üblicherweise im Bereich von ~5–7× Nennstrom, und die Nachteile zeigen sich schnell.
Typische Nebenwirkungen bei Direktstart:
• Spannungseinbruch
• Störabschaltungen
• Kontaktverschleiß
• Kuplungs-/Riemen-/Getriebe-Schock.
Mit einem VFD-Anlauf bleibt der Startstrom oft näher bei ~1.2–1.5× Nennwert, obwohl die tatsächlichen Zahlen weiterhin vom Lastprofil, der Beschleunigungszeit und den Drehmomentanforderungen abhängen. Wenn dieser Stromspitzen vermieden werden, merken die Leute vor Ort es meist, bevor überhaupt jemand mit den Berechnungen beginnt: weniger erschrockene Blicke auf den Schalterstatus, weniger Neustarts während des Schichtbetriebs und ein ruhigeres Steuerungsschränke während der Montagmorgenstarts.
Auch vorgelagerte Geräte profitieren von dem sanfteren elektrischen Profil. Geringerer Anlaufstrom reduziert die Spitzenbelastung auf Transformatoren, Generatoren und gemeinsamen Zuleitungen und senkt die Wahrscheinlichkeit, dass andere empfindliche Lasten im selben Bus einen kurzen Unterspannung erfahren. Bei der Fehlersuche im Feld ist dies eine dieser Änderungen, die stillschweigend Frustrationen reduzieren: "zufällige" Abschaltungen hören auf, zufällig zu sein, und die Wartung muss nicht mehr sporadische Symptome verfolgen, die auf schwierige Starts zurückzuführen waren.
Da das Drehmoment verwaltet werden kann, während die Geschwindigkeit steigt, kann der Antrieb den abrupten Drehmomentanstieg vermeiden, den der Direktstart häufig verursacht. Das zeigt sich in einem vorhersehbareren mechanischen Verhalten, insbesondere bei Maschinen, die dem Team bereits eine gewisse Demut beigebracht haben.
Häufige mechanische Ergebnisse, wenn der Drehmomentanstieg gut geformt ist: längere Lebensdauer des Riemens; weniger Kupplungsfehler; reduzierte torsionale Schwingungen in rotierenden Maschinen.
In vielen Anlagen besteht die praktische Unterscheidung nicht darin, ob die Last einmal startet, sondern ob sie jedes Mal auf die gleiche Weise startet. Lasten mit hohem Anlaufreibungskoeffizienten, klebrigen Produkten oder kalten Lagern reagieren oft besser, wenn die Beschleunigung gezielt eingestellt wird, anstatt zu raten. Stabiles und vorhersehbares Startverhalten steigert das Vertrauen während des normalen Betriebs.
Eine zu aggressive Beschleunigungskurve kann dennoch Stromspitzen und mechanische Stöße verursachen. Eine zu langsame Rampentempo kann den Motor bei niedriger Geschwindigkeit zum Überhitzen treiben, wenn die Lüfterkühlung schwach ist oder die Drehmomentanforderung erhöht bleibt.
Ein Inbetriebnahmeansatz, der sich in der Regel stabiler anfühlt (und später leichter zu verteidigen ist), besteht darin, mit einer konservativen Beschleunigung zu beginnen und diese nur zu verkürzen, wenn der Prozess wirklich davon profitiert, während man ein kleines Set von Signalen beobachtet, die selten irreführen:
Signale, die während der Rampeneinstellung zu beobachten sind:
• Ausgangsstrom des Antriebs
• Motortemperatur (oder thermisches Modell)
• Veränderungen der Vibration
• Konsistenz wiederholter Starts
Breitbandige, sanfte Geschwindigkeitsregelung durch Frequenzvariation
Ein weiteres definierendes Merkmal ist die Geschwindigkeitsregelung ohne mechanische Nachbearbeitung. Anstelle von Änderungen der Polpaare oder Hinzufügungen von Getriebestufen variiert der VFD die Versorgungsfrequenz. Für einen Induktionsmotor werden synchrone Geschwindigkeit und Rotorgeschwindigkeit üblicherweise ausgedrückt als:
n₀ = 60f / P
n = 60f(1 − S) / P
wobei f die Frequenz, P die Anzahl der Pole und S der Schlupf ist. Die Variation von f ermöglicht sanfte Geschwindigkeitsübergänge, während der Schlupf innerhalb eines Bereichs bleibt, den der Regler verwalten kann. In der Praxis bedeutet dies stabileres Prozessverhalten: Förderbänder können mit den Raten, die flussaufwärts oder flussabwärts erforderlich sind, übereinstimmen, Pumpen können der Nachfrage folgen und Ventilatoren können die Druckvorgaben halten, ohne den ständigen Stop-Start-Zyklus, der sowohl Hardware als auch Geduld belastet.
Ein Punkt, der manchmal übersehen wird, bis Schrott oder Nacharbeit es schmerzlich offensichtlich macht, ist, dass sanfte Geschwindigkeitsregelung nicht nur um Bequemlichkeit geht. Reduzierte Prozessvariabilität verringert oft die Eingriffe des Bedienpersonals, und sie kann Qualitätseinbußen einsparen, die auf dem Energiemessgerät nie erscheinen.
VFD-Steuerung zahlt sich am deutlichsten aus, wenn der Prozess tatsächlich Zeit außerhalb der Nennspeed verbringt. Anstatt mit voller Geschwindigkeit zu laufen und den Überschuss durch Drosselung oder Dämpfung abzulehnen, kann das System näher an dem arbeiten, was die Last in diesem Moment tatsächlich verlangt. Das verbessert in der Regel die Stabilität und reduziert den Verschleiß an Steuerungselementen, die sonst ihr Leben damit verbringen, gegen die Maschine zu kämpfen.
Komponenten, die oft weniger Verschleiß aufweisen, wenn Geschwindigkeit zur Steuerung verwendet wird:
• Drosselventile
• Einlassdämpfer
• Bypasswege
• Mechanische Bremsen, die zur Regelung verwendet werden
Der Schlupf S ist mehr als eine Variable in einer Gleichung; er reflektiert, wie der Motor Drehmoment unter Last entwickelt. Die Antriebssteuerung verwaltet den Schlupf indirekt, indem sie Spannung und Frequenz koordiniert, sodass der Motor Drehmoment erzeugen kann, ohne übermäßigen Strom zu ziehen.
Bei der Inbetriebnahme ist es hilfreich, die Drehmomentanforderung über den gesamten Geschwindigkeitsbereich zu betrachten, nicht nur an einem angenehmen Mittelpunktspeed. Einstellungen, die bei mittlerer Geschwindigkeit gut erscheinen, können sich in der Nähe der Drehmomentspitzen bei niedriger Geschwindigkeit als enttäuschend herausstellen, und diese Enttäuschung tritt tendenziell zu den ungünstigsten Zeiten auf, während Kaltstarts, schweren Chargen oder nach einer Prozessstörung.
Hohe Energieeinsparungspotenziale bei variablen Drehmomentlasten
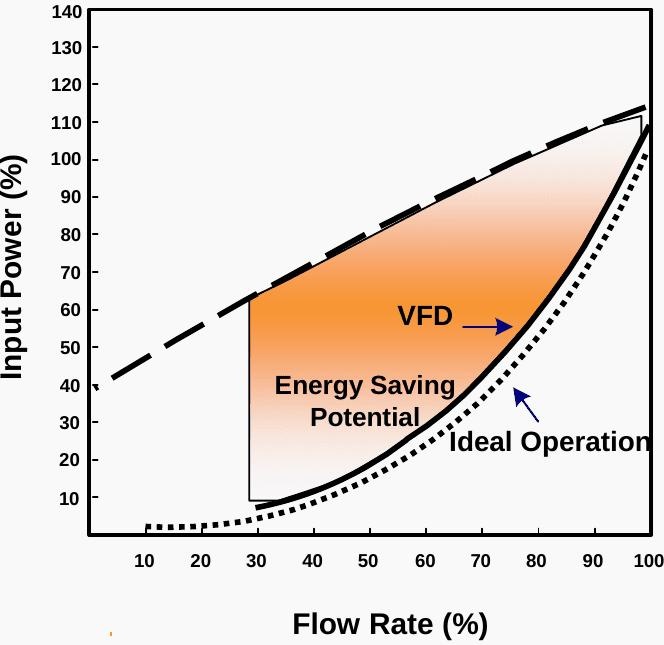
Die Energieeinsparung ist bei variablen Drehmomentlasten wie Ventilatoren und Zentrifugalpumpen oft am stärksten. Die Affinitätsgesetze erklären die Höhe der Einsparungen:
Affinitätsbeziehungen:
• Durchfluss ∝ Geschwindigkeit
• Druck/Höhe ∝ Geschwindigkeit²
• Leistung ∝ Geschwindigkeit³
Da die Leistung mit dem Würfel der Geschwindigkeit skaliert, können selbst moderate Geschwindigkeitsreduktionen große Energieeinsparungen bewirken. Daher folgen Drosselventile und Einlassdämpfer häufig der Geschwindigkeitsreduktion, wenn die Nachfrage variiert: Drosselung dissipiert Energie als Druckverlust, während die Geschwindigkeitsregelung die Energie reduziert, die das System zunächst erzeugen muss.
In Betriebsumgebungen ist der Unterschied normalerweise an mehr als einem Ort sichtbar, was auf sehr praktische Weise befriedigend ist, da es bestätigt, dass die Regelungsstrategie das tut, was das Modell vorhergesagt hat:
Häufige betriebliche Anzeichen für reduzierte Nachfrage bei niedrigerer Geschwindigkeit:
• Niedrigere kW-Zug
• Leiserer Betrieb
• Weniger Wärme im System
• Weniger Wartungsanrufe für Ventile und Dämpfer
Aus professioneller Sicht zeigen sich die Einsparungen, die über lange Zeit stabil bleiben, meist dadurch, dass der VFD als Teil der Regelungsstrategie (Sollwerte, Grenzen und Rückmeldungen) behandelt wird, nicht als manuelle Geschwindigkeitsregelung, die mit Gewohnheiten und Schicht-zu-Schicht-Präferenzen driftet. Wenn der Antrieb mit klarer Logik integriert ist, bleibt die Druck-, Durchfluss- oder Temperaturregelung mit Sicherheitsvorkehrungen in der Regel stabil, selbst wenn sich die Bediener ändern.
Viele Systeme laufen die meiste Zeit ihrer Betriebsstunden im Teillastbetrieb. Ein VFD passt die Motor-Eingangsspannung an die tatsächliche Nachfrage an, anstatt eine Vollastbetrieb zu erzwingen und „nach unten zu managen“ mit Verlusten. Dadurch wird oft der Energieverbrauch gesenkt und gleichzeitig die mechanische Belastung verringert, da das System mit weniger Turbulenz, weniger Drosselverlusten und weniger schnellen Regelungsoszillationen läuft, die sowohl Geräte als auch Betreiber irritieren.
Eine unkomplizierte Möglichkeit, Einsparungen zu validieren, besteht darin, die tatsächliche Leistung (kW) an stabilisierten Betriebspunkten vor und nach der Implementierung der Geschwindigkeitsregelung zu vergleichen, anstatt sich nur auf Nennwertannahmen zu stützen. Diese Messung-erst-Präferenz neigt dazu, unangenehme Gespräche später zu vermeiden, insbesondere wenn Systemkurven, Mindestförderungsbeschränkungen und Regelungstuning das Ergebnis beeinflussen.
Feldfaktoren, die Ergebnisse oft von den theoretischen Schätzungen ablenken:
• Form der Systemkurve
• Mindestförder- und Förderhöhegrenzen
• Sensoreinbau
• PID-Tuning
• Umgehungs- oder Rücklaufverhalten
VFD-Eigenschaften
Die definierenden Eigenschaften eines VFDs können in drei ergebnisorientierte Themen zusammengefasst werden, die in der gleichen Sprache formuliert sind, die die Menschen verwenden, wenn sie entscheiden, ob die Installation „funktioniert“ hat:
(1) Sanftere Starts mit niedrigerem Einschaltstrom und weniger elektrischen/mechanischen Stress.
(2) Sanfte, weitreichende Geschwindigkeitsregelung durch Frequenzvariationen mit kontrolliertem Gleitrissverhalten.
(3) Starke Energieeinsparung bei variablen Drehmomentlasten, da die Leistung schnell fällt, wenn die Geschwindigkeit reduziert wird.
Wenn diese Themen mit praktischem Tuning und prozessorientierter Steuerlogik angewendet werden, sind die Ergebnisse über Schichten und Jahreszeiten hinweg konsistent, was oft das ist, was die Teams tatsächlich wollen: weniger Überraschungen, weniger Stop-the-Line-Ereignisse und eine Leistung, die stabil bleibt, nachdem die Inbetriebnahme-Mannschaft das Feld verlässt.
Fazit
Die Leistung eines VFD hängt von viel mehr ab als nur von der Änderung der Motorgeschwindigkeit. Ein stabiler Betrieb erfordert eine sorgfältige Koordination von Frequenz, Spannung, Stromregelung, Motorparametern, thermischen Bedingungen und Lastverhalten. Unterschiedliche Kontrollstrategien balancieren Drehmomentreaktion, Effizienz, Stabilität und dynamische Leistung basierend auf den Anwendungsanforderungen. Da industrielle Systeme höhere Effizienz, Präzision und Zuverlässigkeit verlangen, entwickelt sich die VFD-Technologie weiter durch verbesserte Steuerungsmethoden, Schutzsysteme und leistungselektronische Designs, die moderne motorgetriebene Anwendungen unterstützen.
Häufig gestellte Fragen [FAQ]
1. Warum regelt ein VFD die Spannung zusammen mit der Frequenz, anstatt nur die Frequenz zu ändern?
Ein VFD passt sowohl die Spannung als auch die Frequenz an, um den magnetischen Fluss des Motors innerhalb eines stabilen Betriebsbereichs zu halten. Wenn die Frequenz ohne angemessene Spannungsanpassung sinkt, schwächt sich der Fluss und die Drehmomentfähigkeit fällt stark ab, insbesondere bei niedriger Geschwindigkeit. Wenn die Spannung für die Betriebsfrequenz zu hoch bleibt, kann der Motor übermäßigen magnetisierenden Strom ziehen, was die Wärme erhöht und das Isolationssystem belastet. Die Koordination von Spannung und Frequenz ermöglicht es dem Antrieb, nutzbares Drehmoment, stabiles Stromverhalten und vorhersehbare thermische Leistung bei sich ändernden Lastbedingungen aufrechtzuerhalten.
2. Warum stammen viele VFD-Probleme, die auf Motoren zurückgeführt werden, tatsächlich von der Eingangsseite des Antriebs?
Viele Probleme, die den Motoren zugeschrieben werden, werden tatsächlich durch die Wechselwirkungen der Gleichrichterstufe mit der elektrischen Versorgung verursacht. Standard-Diodengleichrichter ziehen nicht-sinusoidalen Strom, was Harmonische einführt und schwache Stromversorgungssysteme mit hoher Quellimpedanz destabilisieren kann. Symptome wie Ärgerauslösungen, Erwärmung von Transformatoren, Spannungsinstabilität oder intermittierende Fehler treten oft aus der Beziehung zwischen dem Antrieb und dem ankommenden Stromversorgungssystem auf, anstatt vom Motor selbst. Komponenten auf der Eingangsseite wie Linienreaktoren, Gleichstrom-Link-Drosseln und EMI-Filter werden häufig hinzugefügt, um diese Wechselwirkungen zu stabilisieren.
3. Warum gelten Gleichstrom-Link-Kondensatoren als eines der am stärksten beanspruchten Bauteile in einem VFD?
Gleichstrom-Link-Kondensatoren absorbieren Ripple-Strom, stabilisieren die Busspannung und speichern temporär Energie während schneller Laständerungen. Im Laufe der Zeit verschlechtert sich die Kapazitätsleistung allmählich durch kontinuierlichen thermischen Stress und Ripple-Strom-Exposition. Ein Antrieb kann weiterhin betrieben werden, selbst wenn sich die Kapazität verschlechtert, was das Problem anfangs schwer erkennbar macht. Schließlich wird der Antrieb empfindlicher auf Spannungseinbrüche, regenerative Ereignisse und transiente Laständerungen, was oft unerklärte Auslösungen oder instabiles Verhalten erzeugt, bevor ein vollständiger Kapazitätsausfall auftritt.
4. Warum verbessert die Erhöhung der PWM-Trägerspannungsfrequenz die Motorakustik, erhöht jedoch den thermischen Stress im Inneren des Antriebs?
Eine höhere PWM-Tragfrequenz erzeugt einen gleichmäßigeren Motorstrom und reduziert hörbare Geräusche, indem die Schalt-Harmonischen über den am auffälligsten wahrnehmbaren Hörbereich verschoben werden. Jede Schaltveranstaltung erzeugt jedoch Verluste innerhalb der IGBTs und der Leistungselektronik. Mit steigender Schaltfrequenz nehmen die Verluste im Wechselrichter und die interne Erwärmung erheblich zu. Dies schafft einen praktischen ingenieurtechnischen Kompromiss zwischen einem leiseren Motorbetrieb und der Aufrechterhaltung einer akzeptablen thermischen Marge innerhalb des VFD. In vielen Installationen wirkt sich die Einstellung der Tragfrequenz direkt auf die langfristige Zuverlässigkeit und die Kühlanforderungen des Gehäuses aus.
5. Warum lösen regenerative Lasten häufig DC-Überspannungsfehler während der Verzögerung aus?
Wenn ein Motor abbremst oder durch die Last selbst angetrieben wird, beginnt er wie ein Generator zu wirken und gibt Energie in den DC-Bus zurück. Wenn die regenerierte Energie schneller in den Bus fließt, als sie dissipiert oder ins Netz zurückgegeben werden kann, steigt die DC-Spannung schnell an und löst den Überspannungsschutz aus. Dieses Verhalten wird stark von der Trägheit der Last und der Aggressivität der Verzögerung beeinflusst. Viele Überspannungsprobleme werden durch Verlängerung der Verzögerungsrampe oder durch die korrekte Dimensionierung von Bremswiderständen und regenerativer Hardware gelöst, um die tatsächliche mechanische Energie im System anzupassen.
6. Warum bietet die Vektorkontrolle normalerweise bessere Ergebnisse als die skalare V/Hz-Kontrolle bei niedriger Geschwindigkeit und während Laständerungen?
Die skalare V/Hz-Kontrolle reguliert das Motorverhalten indirekt, indem sie ein approximatives Spannungs-zu-Frequenz-Verhältnis beibehält, was gut für vorhersehbare Lasten wie Ventilatoren und Pumpen funktioniert. Die Vektorkontrolle, insbesondere die feldorientierte Kontrolle (FOC), reguliert direkt die Drehmoment erzeugenden und fluss erzeugenden Stromkomponenten separat. Dies ermöglicht es dem Antrieb, viel schneller auf Laständerungen zu reagieren und ein stärkeres Drehmoment selbst bei nahezu null Geschwindigkeit aufrechtzuerhalten. Der Unterschied wird besonders bei Anwendungen mit schneller Beschleunigung, hohem Anlaufdrehmoment oder sensiblen Geschwindigkeitsregelungsanforderungen deutlich.
7. Warum können vektorsteuerungsgestützte Antriebe nach Temperaturänderungen oder Motorwechsel instabil werden?
Die Vektorkontrolle hängt stark von der genauen Schätzung der Motorparameter ab. Der Rotorwiderstand, der Statorwiderstand, das Verhalten der magnetischen Sättigung und die Kabelimpedanz können sich unter realen Betriebsbedingungen ändern. Temperaturänderungen und Motorwechsel verändern häufig diese Parameter ausreichend, um die Schätzgenauigkeit zu verringern, insbesondere bei niedriger Geschwindigkeit, wo Beobachtungsmodelle empfindlicher werden. Systeme, die anfangs reibungslos arbeiten, können später Geräusche, instabile Drehmomentreaktionen oder inkonsistente Geschwindigkeitsregelungen entwickeln, wenn das Motor-Modell die realen elektrischen Eigenschaften nicht mehr widerspiegelt.
8. Warum wird das Autotuning als einer der wichtigsten Schritte während der Inbetriebnahme des VFD angesehen?
Das Autotuning passt das Steuerungsmodell des Antriebs an die tatsächlichen elektrischen Eigenschaften des Motors an, anstatt sich nur auf die Typenschildwerte zu verlassen. Dies verbessert die Stromregelung, die Drehmomentreaktion, die Schlupfschätzung und das Verhalten bei niedriger Geschwindigkeit. In vielen Installationen ist das Autotuning der Punkt, an dem das System von bloßem Funktionieren zu reibungsloser und vorhersehbarer Operation übergeht. Rotierende Autotuning-Verfahren sind besonders wertvoll für Anwendungen, die ein starkes Drehmoment bei niedriger Geschwindigkeit oder eine präzise Transientenreaktion erfordern, da sie das Motorverhalten unter realen Betriebsbedingungen erfassen.
9. Warum reduzieren VFDs den Energieverbrauch bei Pumpen und Ventilatoren erheblich im Vergleich zu Drosselmethoden?
Bei centrifugalpumpen und Ventilatoren folgt der Energieverbrauch den Affinitätsgesetzen, bei denen die Leistung ungefähr mit dem Kubus der Geschwindigkeit variiert. Das bedeutet, dass selbst bescheidene Geschwindigkeitsreduktionen erhebliche Energieeinsparungen produzieren können. Traditionelle Drosselmethoden zwingen den Motor, mit voller Geschwindigkeit zu laufen, während der Fluss mechanisch eingeschränkt wird, was Energie als Druckverlust verschwendet. Ein VFD hingegen reduziert die Motorgeschwindigkeit direkt, sodass das System nur den erforderlichen Durchfluss oder Druck erzeugt und den Leistungsbedarf an seiner Quelle senkt, anstatt überschüssige Energie zu dissipieren.
10. Warum erhöhen moderne, schnellschaltende VFD-Technologien die Bedenken hinsichtlich EMI und Lagerströme?
Moderne PWM-Antriebe, insbesondere solche, die SiC- oder GaN-Schaltelemente verwenden, erzeugen extrem schnelle Spannungstransitionen mit hohen dV/dt. Diese schnellen Kanten können gemeinsame Modusspannungen, elektromagnetische Interferenzen und Streuachsenströme erzeugen, die durch Motorlager hindurchfließen. Wenn Erdung, Kabelabschirmung, Filterung und Verbindungspraktiken schlecht ausgeführt sind, können die Ergebnisse vorzeitiger Lagerverschleiß, laute Sensoren, Kommunikationsinstabilität oder Isolationsstress einschließen. In Hochleistungsinstallationen wird die Qualität der Verdrahtung und der Erdung oft ebenso wichtig wie der Regelungsalgorithmus selbst.
Verwandter Blog
-
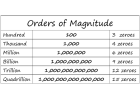
Wie viele Nullen in einer Million, Milliarden, Billionen?
![Wie viele Nullen in einer Million, Milliarden, Billionen?]()
2024/07/29
Millionen repräsentieren 106, eine leicht griffbare Figur im Vergleich zu alltäglichen Gegenständen oder jährlichen Gehältern. Milliarden, entspr... -
IRLZ44N MOSFET -Datenblatt, Schaltung, Äquivalent, Pinout
![IRLZ44N MOSFET -Datenblatt, Schaltung, Äquivalent, Pinout]()
2024/08/28
Der IRLZ44N ist ein weit verbreiteter N-Kanal-Power-MOSFET.Es ist bekannt für seine hervorragenden Schaltkapazitäten und eignet sich sehr für zahlr... -
Batteriestemperatur zu niedrig, das Laden gestoppt.Wie repariere ich es?
![Batteriestemperatur zu niedrig, das Laden gestoppt.Wie repariere ich es?]()
2024/10/6
Das Ladeproblemen von Mobiltelefonen sind häufig, können jedoch effektiv verwaltet werden.Die Temperatur spielt eine große Rolle bei der Batterieff... -
BC547 Transistor umfassender Leitfaden
![BC547 Transistor umfassender Leitfaden]()
2024/07/4
Der BC547 -Transistor wird üblicherweise in einer Vielzahl elektronischer Anwendungen verwendet, die von grundlegenden Signalverstärkern bis hin zu ... -
Umfassende Anleitung zum SCR (Siliziumgesteuerte Gleichrichter)
![Umfassende Anleitung zum SCR (Siliziumgesteuerte Gleichrichter)]()
2024/04/22
Siliziumkontrollierte Gleichrichter (SCR) oder Thyristoren spielen aufgrund ihrer Leistung und Zuverlässigkeit eine entscheidende Rolle in der Energi... -
LR621, SR621SW, 364, AG1 -Batterieäquivalente und Ersatz
![LR621, SR621SW, 364, AG1 -Batterieäquivalente und Ersatz]()
2024/07/15
Die Batterien von LR621- und SR621SW -Tasten sind in kompakten elektronischen Geräten wie Uhren, kleinen Spielzeugen, Taschenrechnern und Fernschlüs... -
Grundlagen von Op-Ampere-Schaltungen
![Grundlagen von Op-Ampere-Schaltungen]()
2023/12/28
In der komplizierten Welt der Elektronik führt uns eine Reise in ihre Geheimnisse ausnahmslos zu einem Kaleidoskop aus exquisiten und komplexen Schal... -
Ein vollständiger Leitfaden für Multiplexer und ihre Rolle in digitalen Systemen
![Ein vollständiger Leitfaden für Multiplexer und ihre Rolle in digitalen Systemen]()
2025/09/20
Multiplexer sind Komponenten in digitalen Systemen, mit denen mehrere Eingangssignale unter Verwendung binärer Logik- und Kontrollsignale in eine ein... -
Vergleich der Unterschiede und Anwendungen von NMOs und PMOS
![Vergleich der Unterschiede und Anwendungen von NMOs und PMOS]()
2024/11/15
Das Verständnis der Unterschiede zwischen NMOS- und PMOS -Transistoren ist wichtig für die Gestaltung effizienter Schaltkreise.NMOs (N-Type-Metallox... -
CR2450 gegen CR2032 Vergleich: Alles was Sie wissen müssen
![CR2450 gegen CR2032 Vergleich: Alles was Sie wissen müssen]()
2025/09/15
Button -Batterien wie CR2450 und CR2032 führen viele alltägliche Elektronik aus, von Uhren und Fernbedienungen bis hin zu medizinischen und industri...






Heiße Teile
- K4S511632B-TC75
- M52067FP
- RC82573L
- ACPM-9007-BLK
- ICS950812CGLF
- M28W800CB70ZB6
- IDT71V321L55PFI
- 08051A270FAT2A
- CL05B473KO5NNND
- HD6432635UA81FJ
- LX62UL256SC-45
- UVR1H470MED1TD
- MC14495P1
- AD5258BRMZ10
- CM200YE4-12F
- RN73C1E10K7BTDF
- MT89L80AP1
- XC9536PC44AEM-15C0001
- DMN2046U-7
- CXB1443R-T4
- NT7167FG-00033
- CY7C68013A-128AXC
- SN74LVC2244ADGVR
- 74ACT843SPC
- RT1206DRD071KL
- NC7SZ332L6X
- LC1117CLTR18
- A42MX16-TQG176
- HY5DU283222AF-28
- M82520-14
- VI-2W0-CW/F1
- PI5A126U
- 06033A100JAT4A
- TAJT105M020RNJ
- XZFABBA10A
- LM1117IMP-5.0/NOPB
- ADE7878AACPZ-RL
- TLV320AIC24KIPFB
- AM3352BZCEA60
- STD4NK50ZT4
- T495D226M020ZTE200
- ICS1562BMLF
- K3RG4G40MM-MGCJT00E
- LCMX02-7000HC-4FG484I
- MC74HC4052AG
- UPD65029GD-083-5BB
- LM66100DCK
- SN27546YPHR.B1
- GLS85LS1002P-S-I-FZJE-TT095
- TPS826711SIP