- Deutsch
-
EnglishDeutschItaliaFrançais한국의русскийSvenskaNederlandespañolPortuguêspolski繁体中文SuomiGaeilgeSlovenskáSlovenijaČeštinaMelayuMagyarországHrvatskaDanskromânescIndonesiaΕλλάδαБългарски езикGalegolietuviųMaoriRepublika e ShqipërisëالعربيةአማርኛAzərbaycanEesti VabariikEuskeraБеларусьLëtzebuergeschAyitiAfrikaansBosnaíslenskaCambodiaမြန်မာМонголулсМакедонскиmalaɡasʲພາສາລາວKurdîსაქართველოIsiXhosaفارسیisiZuluPilipinoසිංහලTürk diliTiếng ViệtहिंदीТоҷикӣاردوภาษาไทยO'zbekKongeriketবাংলা ভাষারChicheŵaSamoa日本語SesothoCрпскиKiswahiliУкраїнаनेपालीעִבְרִיתپښتوКыргыз тилиҚазақшаCatalàCorsaLatviešuHausaગુજરાતીಕನ್ನಡkannaḍaमराठी
PMIC erklärt: Funktionen, Typen und Anwendungen
Katalog
PMIC erkunden
Ein PMIC (Power Management Integrated Circuit) ist ein dedizierter IC, der ein oder mehrere Stromeingänge akzeptiert und multiple regulierte, kontrollierte Stromschienen für die unterschiedlichen Lasten auf einer Platine erzeugt. Diese Lasten sind oft Prozessoren, Speicher, RF-Abschnitte, Sensoren und verschiedene Peripheriegeräte.
Statt diskrete Regler und Überwachungs-ICs über das Design zu verteilen, konsolidiert ein PMIC sie in einen koordinierten Energiemanagement-Domain-Manager. Für viele Teams bringt diese Konsolidierung auch ein gewisses Maß an Seelenfrieden während des Hochlaufens, da es einen Ort gibt, an dem man nachsehen kann, wenn die Stromschienen seltsam reagieren.
Prozessoren, Speicher, RF-Blöcke, Sensoren und andere Lasten.
Funktionaler Umfang
In realen Produkten geht der Beitrag eines PMICs weit über die Spannungsumwandlung hinaus. Der praktische Nutzen zeigt sich, wenn er wie ein systemweites Energiemanagement fungiert, das mehrere Verantwortlichkeiten zusammenführt, die während des Boot-Vorgangs, bei Lastschritten im Betrieb und unter Fehlbedingungen natürlich miteinander interagieren.
Umwandlung
Ein PMIC kann verschiedene Reglerarten kombinieren, sodass auf Effizienz ausgelegte Stromschienen und noise-sensible Stromschienen separat optimiert werden können. In praktischen Designs besteht das Hauptanliegen oft nicht darin, die benötigte Spannung zu erzeugen, sondern die Spannung während Laständerungen, Startereignissen und anderen anspruchsvollen Betriebsbedingungen stabil zu halten.
Buck-Regler, Boost-Regler, Buck-Boost-Regler und LDO-Regler.
Eine Schiene, die bei einer stabilen Last sauber aussieht, kann unter realen Lastprofilen sichtbar gestresst werden. Effizienz, Ripple, transiente Reaktion und thermischer Spielraum werden häufig genau untersucht, wenn CPU-Spitzenströme, RF-Übertragungspulse oder Sensor-Abtastspitzen unter realen Betriebsbedingungen getestet werden.
CPU-Spitzen, RF-Übertragungspulse und Sensor-Abtastspitzen.
Verteilung
Nachdem die Stromschienen erzeugt wurden, diktiert ein PMIC oft, wie sie geteilt, geschaltet und isoliert werden. Hier kann sich ein Design entweder robust oder fragil anfühlen, insbesondere während Hot-Plug-, Brownout- und kabelbezogenen Ereignissen. Wenn die Verteilung durchdacht gehandhabt wird, wird der Anlauf kontrolliert, Rückspeisepfade werden eingegrenzt und ein Fehler ist weniger wahrscheinlich, dass er in einen platinenweiten Ausfall übergeht.
Schienenaktivierungen, Lastschalter, Strombegrenzung und ideale Dioden-ORing für Multi-Source-Eingänge.
Erkennung und Überwachung
Die meisten PMICs integrieren Überwachungen, die kontinuierlich die Gesundheit der Stromschienen überwachen und Signale liefern, die von Firmware und Hardware interpretiert werden können. In einem Labor hören sich diese Funktionen schnell nicht mehr wie nette Ergänzungen an, sondern fühlen sich an wie der Unterschied zwischen einer sauberen Debug-Sitzung und einem Tag, an dem man einem Reset nachjagt, der sich nicht auf Anforderung reproduzieren lässt.
Unterspannungsüberwacher, Überspannungsüberwacher, Überstromerkennung, temperatursensierende Elemente und Power-Good-Signalisierung.
Eine Lektion, die den erfahrenen Bring-up-Teams oft im Gedächtnis bleibt, ist, dass die Power-Good-Schwellenwerte und die Entglitch-Zeit unmissverständlich sein müssen. Wenn sie vage oder schlecht auf das System abgestimmt sind, sind die Folgen oft falsche Zurücksetzungen oder Geister-Systemstarts, die nur an Temperaturgrenzen, bei bestimmten Batterien oder nach einer Sequenz schneller Neustarts auftreten.
Steuerung und Sequenzierung
Ein PMIC umfasst häufig Mechanismen, um zu gestalten, wie die Spannungsrails steigen, fallen und miteinander koordiniert werden. Diese Details zeigen sich als konkrete Ergebnisse: ob ein System wiederholt bootet, ob Komponenten vermeidbare Belastungen erfahren und ob die Platine nach einem Fehler in einen bekannten Zustand zurückkehrt.
Sequenzierung, sanfter Start, Rampenkontrolle, Entladewege und konfigurierbare Inter-Rail-Zeiten.
Ein digitales System verlangt typischerweise nicht nur nach korrekten Betriebsspannungen; es erwartet auch, dass diese Rails in einer bestimmten Reihenfolge und innerhalb begrenzter Zeitbeziehungen ankommen. Wenn die Steigungen zu steil, zu langsam oder einfach falsch geordnet sind, können interne Strukturen und Bereiche in undefinierten Zuständen enden, die frustrierend intermittierend sind, insbesondere in Bezug auf das SRAM-Retention-Verhalten und das Hochfahren von Hochgeschwindigkeits-Schnittstellen.
Interne ESD-Strukturen, SRAM-Retention-Bereiche und Hochgeschwindigkeits-Schnittstellen.
Was die Ergebnisse in realen Designs formt
Wenn ein Team von einem Blockdiagramm zu einem funktionierenden Prototyp wechselt, hängt die Auswahl und Konfiguration des PMIC oft von betrieblichen Einzelheiten ab, anstatt von marketingtauglichen Spezifikationen. Die subtilen Probleme sind die, die Zeitdruck erzeugen, weil sie spät auftauchen und selten als einzige, offensichtliche Wurzelursache präsentiert werden.
Umgehen mit schnellen Transienten und dynamischen Lasten
Moderne Prozessoren und RF-Bereiche können große Stromänderungen auf Mikroseunden-Zeitskalen verlangen. Ein PMIC kann auf dem Papier vollkommen akzeptabel erscheinen und dennoch Drifts, Überschüsse oder Ringing zeigen, sobald die Regelkreise, die Kompensationsansätze, das Ausgangsnetzwerk und die PCB-Parasiten gezwungen sind, im realen Layout zu interagieren.
Drifts, Überschüsse und Ringing.
Teams, die frühzeitig die transiente Reaktion testen, tun dies oft, weil sie den Schmerz verspürt haben, es zu spät zu entdecken. Eine frühzeitige Validierung kann die Wahrscheinlichkeit eines unangenehmen Neugestaltungszyklus verringern, der Induktivitäten, Ausgangskondensatoren, Kompensationskomponenten oder sogar die Wahl des PMIC selbst umfasst.
Induktivitäten, Kondensatoren, Kompensationskomponenten und der PMIC selbst.
Sequenzierung als Systemvertrag, nicht als Annehmlichkeit
Die Stromsequenzierung funktioniert am besten, wenn sie als Vertrag über Silicon-Anforderungen, Firmware-Annahmen und Board-Verhalten behandelt wird. Wenn die Ramping-Raten und Power-Good-Zeiten von dem abweichen, was das Prozessor-Datenblatt erwartet, oder was die Firmware implizit annimmt, treten häufig intermittierende Boot-Probleme auf.
Anforderungen des Prozessor-Datenblatts und Erwartungen der Firmware.
Was diese Probleme besonders frustrierend macht, ist ihre Tendenz, unter günstigen Prüfbedingungen zu verschwinden und während Temperatur-Extremen, Hot-Plug bei Batterien oder marginalen Versorgungsbedingungen zurückzukehren. In diesen Umgebungen reduzieren deterministische Sequenzierung und vorhersehbares Rücksetzverhalten Überraschungen und verkürzen die Debug-Zyklen.
Temperaturgrenzen, Hot-Plug-Ereignisse bei Batterien und brownaut-ähnliche Bedingungen.
Schutzverhalten als Hebel für Betriebszeit und Servicekosten
Überstromgrenzen, thermische Abschaltung und UV-/OV-Schutz werden oft in der Sprache der Sicherheit diskutiert, aber eingesetzte Produkte erleben sie als Verfügbarkeitsmerkmale. Ein PMIC, der den Strom elegant limitiert, Fehler mit ausreichender Klarheit meldet, um handlungsfähig zu sein, und sich auf kontrollierte Weise erholt, kann verhindern, dass ein kleiner Peripherieversagen in einem vollständigen Systemausfall und einem Support-Ticket endet.
Schutzmechanismen: Überstromschutz, thermische Abschaltung, Unterspannungsschutz und Überspannungsschutz.
Vorteile der Systemzuverlässigkeit: Elegante Strombegrenzung, Fehlermeldung und kontrollierte Wiederherstellung.
Es ist oft genauer und ehrlich gesagt nützlicher während der Design-Abwägungen, den PMIC als Teil der Zuverlässigkeitsarchitektur des Systems zu betrachten, anstatt nur als einen Stromwandler. Designs, die gut altern, tendieren dazu, einen PMIC basierend darauf auszuwählen, wie konsistent er vorhersehbare Leistungszustände über den normalen Betrieb, Fehlermanagement und Übergänge durchsetzt.
Wenn dieser Gesichtspunkt ernst genommen wird, beginnen Details, die während der frühen Planung leicht heruntergespielt werden, bei der Integration anders zu erscheinen. Das Entladeverhalten der Rails, die Integrität des Power-Good-Signals und die Fehlerttelemetrie werden zu den Eigenschaften, die ein Gerät von einem Gerät unterscheiden, das lediglich im Labor eingeschaltet wird, von einem Gerät, das in der Praxis sauber, wiederholt und vorhersehbar bootet, ohne das Ingenieurteam auf Glück angewiesen zu lassen.
PMIC-Kategorien
PMICs werden oft nach einer Hauptfunktion bezeichnet, doch in der Hardware-Entwicklung verhalten sie sich eher wie ein kompaktes, koordiniertes Stromversorgungssystem als wie eine Einzweckkomponente. Eine praktische Möglichkeit, PMIC-Typen zu unterscheiden, besteht darin, (a) zu betrachten, was sie regulieren, (b) was sie einschränken oder durchsetzen, und (c) was sie verbinden, trennen oder aktiv treiben. Aus der Perspektive des Systemstarts ist die sich immer wieder abzeichnende Trennlinie weniger zwischen linear und Switching und mehr darüber, ob der PMIC gebaut wurde, um die Wechselwirkung zwischen den Spannungspegeln bei wechselnder Last zu verwalten. Wenn diese Wechselwirkung durchdacht behandelt wird, fühlen sich die Platinen während Belastungstests ruhiger an; wenn nicht, kann das gleiche Design an einer Bench-Versorgung gut aussehen und in einem vollständig montierten Produkt launisch werden.
Primäre Funktionale Gruppierungen
Diese Blöcke erzeugen Spannungspegel, setzen Betriebspunkte und absorbieren Änderungen der Eingangszustände. Sie decken typischerweise alles von niederstromigen ruhigen Spannungen bis hin zu hochstromigen digitalen Bereichen ab.
• Lineare Regelung (LDOs)
• Switching-Regelung (Buck, Boost, Buck-Boost, inverting, Laderegler)
• Front-End-Konvertierung und Vorregulierung (AC/DC-Adapter, USB-PD-Senkungsstufen, Automotive-Vorregler auf einigen Plattformen)
Diese Blöcke gestalten, wie Strom sich verhalten darf, indem sie Schwellenwerte definieren, Grenzen überwachen und auf Fehler reagieren. Sie liefern vielleicht keine Watt, entscheiden aber oft, ob ein System sauber oder mysteriös ausfällt.
• Spannungsreferenzen und Bandlücken
• Aufsicht, Überwachung und Fenster-Komparatoren
• Reset-Generierung, Watchdog-Timer und Brownout-Erkennung
• Sequenzierung, Nachverfolgung und Fehlerreaktion (UV/OV, Überstrom, thermische Reaktion)
Diese Blöcke bestimmen, wo Energie fließt, wann sie isoliert ist und wie externe Lasten betrieben werden. In realen Designs sind sie oft der Ort, an dem Randfälle, Hot-Plug-, Kabelabfall- und Zubehörfehler zuerst auftreten.
• Power-Path-Management
• Lastenschalter und eFuses
• Akkuaufladung
• Display-bezogene Spannungsversorgung und Treiber
• MOSFET-Gatetreiber
Regelungs-/Konvertierungstypen
LDOs werden häufig ausgewählt, wenn niedriger Ausgangsrauschen, ein unkomplizierter Entwurfsablauf und ein schnelles Verhalten bei kleinen Signalen wünschenswert sind. Sie erscheinen häufig in RF-Blöcken, Audiobereichen, präzisen Sensoren und ADC-bezogenen Stromversorgungen, bei denen Ripple-Spitzen in messbare Leistungsabfälle umschlagen können.
Wärme ist häufig der begrenzende Faktor in der Regulierung. Wenn der Spannungsunterschied zwischen Eingang und Ausgang steigt oder der Laststrom zunimmt, können Wärmeabgabe und Temperatur wichtiger werden als elektrische Genauigkeitsspezifikationen.
Eine Stromversorgung, die während des offenen Bench-Tests stabil erscheint, kann in geschlossenen Systemen oder Hochtemperaturumgebungen, in denen Luftstrom und thermische Spielräume reduziert sind, erhebliche Heizprobleme entwickeln.
Buck-Wandler übernehmen viel von der Last für effiziente Kernleitungen: Anwendungsprozessoren, DSPs, DDR-Spannungsversorgungen und andere hochstromige digitale Bereiche. In der Praxis können zwei Platinen, die den gleichen Buck-Wandler verwenden, je nach Steuerungsmodus, Betriebsmodi bei geringer Last und layoutbedingten parasitären Effekten sehr unterschiedlich agieren.
• Steuerungsansatz (Spannungsmodus, Strommodus, hysteretisch, konstante Einschaltzeit)
• Verhalten bei leichter Last (PFM, Pulsüberspringen, erzwungene PWM)
• Transientenreaktion versus Ausgangs-Ripple-Trad-offs
• EMI-Position (Spread-Spectrum-Optionen, Schaltfrequenzwahl, Layout-Sensitivität)
Ein Detail, das dazu neigt, Entwurfsprüfungen zu schärfen, ist die Realität des Lastprofils. Ein Wandler, der bei 2 A hervorragend aussieht, kann den Großteil seiner Lebensdauer bei 20–200 mA verbringen, wo Modusübergänge, Gatterladeverluste und Switching-Overhead dominieren. Der Vergleich nur der Spitzenwirkungsgrade kann dazu führen, dass die Batterielebensdauer im realen Betrieb schlechter wird als ursprünglich geschätzt.
Boost-Wandler werden gewöhnlich angewendet, wenn die Zielspannung die Quelle übersteigen muss. Häufige Beispiele sind die Erzeugung von 5 V aus einer Ein-Zellen-Batterie, das Erzeugen von Display-Bias-Spannungen oder das Speisen von LED-Leisten. Buck-Boost-Topologien werden bevorzugt, wenn der Eingang über und unter die gewünscht Ausgangsspannung schwanken kann, wie beispielsweise bei der Erhaltung einer stabilen Systemspannung über die gesamte Entladekurve der Batterie.
Diese Wandler lösen oft systemweite Kopfschmerzen, wie das Stabilhalten eines 5 V-Bereichs, während die Batterie absinkt, aber diese Erleichterung geht mit mehr beweglichen Teilen einher: Komplexität der Kompensation, Verhalten des Schalterstrombegrenzung und durchgeführte EMI, die überraschend empfindlich auf die Platinengeometrie und Kabelbedingungen reagieren kann.
In Phones und kleinen IoT-Modulen ist der AC/DC-Block häufig außerhalb des Produkts, doch die Front-End-Verhandlung und der Eingangs-Schutz landen zunehmend innerhalb des Geräts. Selbst wenn ein Datenblatt diese als USB-Funktionen und nicht als PMIC-Funktionen vermarktet, prägen sie stark die Dimensionierung der nachgeschalteten Wandler, die Wärmeverteilung und die schlechtesten Belastungen.
• USB-PD-Erkennung und Verhandlungsunterstützung
• Eingangsstrombegrenzung und Einschaltstromkontrolle
• Überspannungsschutz für USB-Zubehör und Adapter
Präzisionsstützblöcke
Referenzverankerungsgenauigkeit für ADCs, DACs und Komparator-Grenzen. Bei Mixed-Signal-Produkten sind es häufig Details wie Driftverhalten, Rauschdichte und PSRR im relevanten Frequenzbereich, die entscheidend sind. Es kann kontraintuitiv erscheinen, aber ein kleiner Betrag an Referenzrauschen kann sich als messbares Jitter, Sensorfehler oder Schwellenwert mehrdeutigkeit zeigen, sobald es durch echte Gewinn- und Filteroptionen multipliziert wird.
Aufsichtsmechanismen überwachen die Schienen auf Unterspannung, Überspannung und Sequenzierungsverstöße. In Mehrschienensystemen helfen sie, halblebende Zustände zu vermeiden, in denen eine Domäne hochfährt und zu arbeiten beginnt, während eine andere Domäne verspätet, braun oder oszillierend ist.
Aus der Sicht der Zuverlässigkeit neigt eine robuste Überwachung dazu, die Art von intermittierenden Feldrückläufern zu reduzieren, die jeden frustrieren: Probleme, die nur bei Kaltstarts, niedrigen Batterieständen, schnellen Hot-Plug-Ereignissen oder an der Grenze liegenden Kabeln auftreten, die nie im „happy path“ des Labors waren.
Sequenzierung ist mehr als Schiene A dann Schiene B. Es verwandelt sich in eine Diskussion über Zeitverträglichkeit, Steigungsrampen, Rücksetzbeziehungen und was passiert, wenn eine Schiene ihr Zeitfenster verpasst.
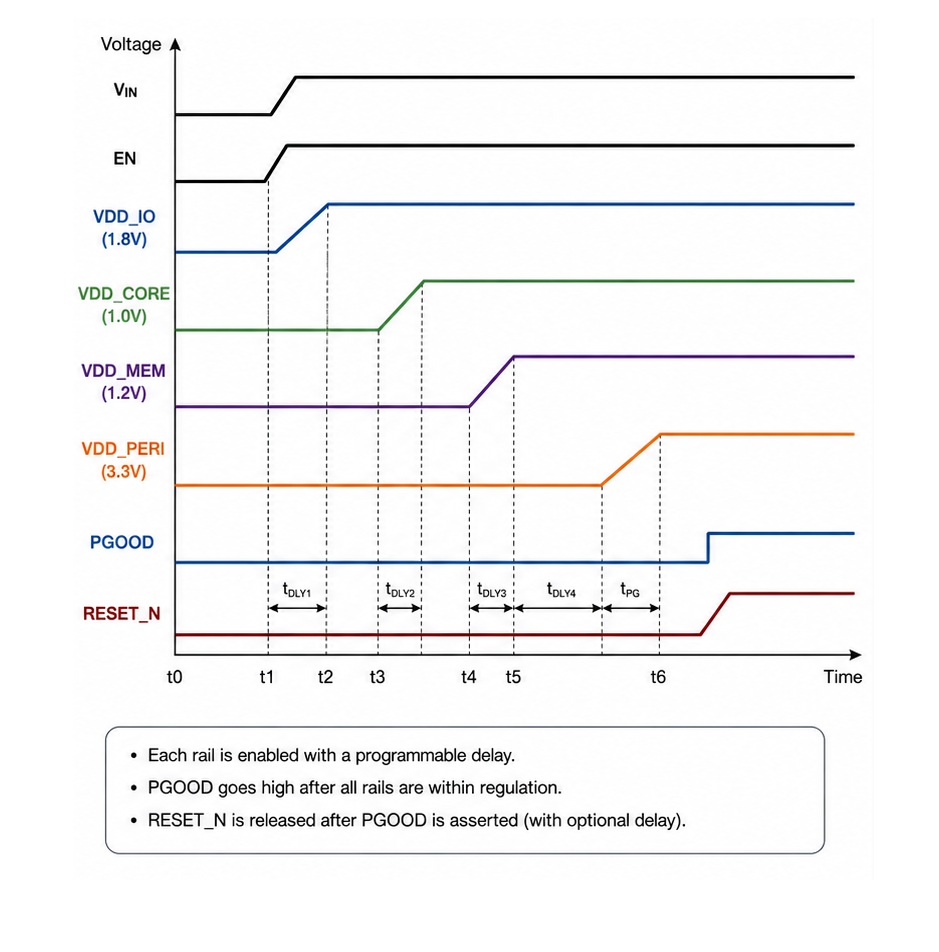
SoC-Dokumentationen spezifizieren häufig IO-vor-Core-Abhängigkeiten, Einschränkungen beim Speicherraining und präzise Zeiten für das Aufheben des Rücksetzens. PMICs mit programmierbarer Sequenzierung und kontrollierten Rampen können externe Klemm-Logik reduzieren und das Hochfahren weniger wie Rätselraten erscheinen lassen, insbesondere wenn Platinen schnell iterieren und kleine Zeitänderungen Tage der Fehlerbehebung einsparen können.
Power-Pfad- und Antriebsfunktionen
Die Power-Pfad-Logik entscheidet, ob das System von USB, Batterie oder einer Mischung aus beidem läuft, und sie beeinflusst, was während Übergängen passiert.
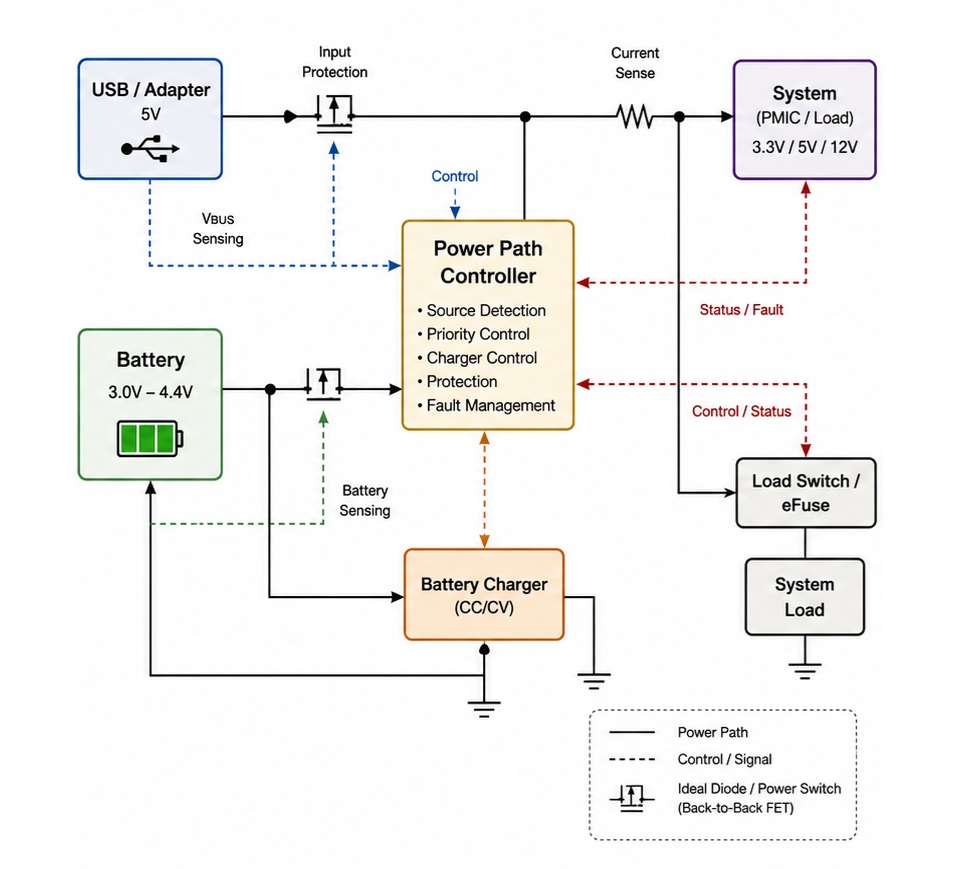
• Nahtloses Umschaltverhalten (Begrenzung von Abfall, die Rücksetzungen auslösen)
• Eingangsstrombegrenzung, um USB/Adapter und Compliance-Bedingungen zu entsprechen
• Ideal-Diodenverhalten zur Reduzierung des Rückstroms
Eine wiederkehrende Falle in der realen Welt ist die Unterschätzung des Widerstands in Kabeln, Steckverbindern und Schutzelementen. Während eines schnellen transiente kann der PMIC genau wie vorgesehen arbeiten und das System kann trotzdem braun werden, weil der aufwärts gerichtete Pfad stärker absinkt, als das Modell angenommen hat. Diese Fehler erscheinen „unfair“, bis die gesamte Pfadimpedanz gemessen und als Teil des Designs behandelt wird, nicht als Fußnote.
Ladegeräte variieren in der Unterstützung von Batteriematerialien, Schaltungs-Topologien, thermischen Eigenschaften und Designzielen. Gemeinsame Prioritäten sind schnelleres Laden, niedrigere Oberflächentemperatur, reduzierte EMI oder die Aufrechterhaltung der Systemleistung während des Ladevorgangs.
• Lineare Ladegeräte
• Schaltladegeräte
• Power-Bank/OTG-Modi
Die Auswahl beruht oft auf dem thermischen Budget, regulatorischen oder Interoperabilitätsbeschränkungen und darauf, ob das Gerät erwartet wird, während des Ladens die volle Leistung aufrechtzuerhalten, ohne träge zu wirken oder unangenehm warm zu laufen.
Lastschalter werden häufig verwendet, um Schienen für die Reduzierung der Standby-Leistung zu steuern und um Domänen während Fehler- oder Versandzuständen zu isolieren. eFuses fügen programmierbare Stromgrenzen, Fehlerzeitgeber und kontrollierte Einschaltverhalten hinzu.
In vielen Produkten amortisieren diese Blöcke ihre Platinenfläche, indem sie chaotische Fehlermodi, Kurzschlüsse an Steckverbindern, Zubehörfehler und Fehlsteckereignisse in kontrollierte Vorfälle umwandeln, anstatt kaskadierende Rücksetzungen oder physische Schäden zu verursachen, die teuer zu diagnostizieren und noch schwieriger zu reproduzieren sind.
Displaysysteme erfordern oft mehrere Stromschienen wie AVDD, VGH und VGL mit sorgfältig gesteuerter Startsequenzierung, um sichtbare Anzeigefehler zu vermeiden. LED-Treiber müssen außerdem den Strom genau regeln und zuverlässig auf offene Leitungen und Kurzschlussfehler reagieren, da diese Bedingungen häufig während des Betriebs auftreten.
Treiber und leistungsstärkere Stufen werden in der Robotik, Automobilelektronik und Industrieausrüstung zunehmend relevant, wo die Motorsteuerung und die Hochspannungsumwandlung mit der PMIC-artigen Koordination, Telemetrie und Schutzrichtlinien zusammentreffen.
Der typische „Telefon/Iot PMIC“
In vielen Telefonen und kompakten IoT-Modulen wird ein PMIC am besten als bewusste Mischung von Blöcken verstanden, anstatt als eine einzige Kategorie. Die Integration zielt in der Regel darauf ab, die PCB-Fläche zu reduzieren, die Sequenzierung zu vereinfachen und der Firmware einen einzigen Ort zu geben, um das Leistungsverhalten zu beobachten und zu beeinflussen.
• Mehrere hocheffiziente Abwärtswandler für CPU, GPU, Speicher und immer aktive Schienen
• Einen oder mehrere LDOs für rauscharmen analogen und RF-Schienen
• Lade- und Power-Pfad-Schaltungen für USB- und Batterikoordination
• Monitore, Sequenzierer, thermische Kontrollen und Interruptberichterstattung für Telemetrie und Fehlerbehandlung
Was die Ergebnisse tendenziell dominiert, ist die Schieneninteraktion. Ein Buck-Transient kann sich über die gemeinsame Erdimpedanz in einen RF LDO einkoppeln. Die thermische Rückführung des Ladegeräts kann leise den verfügbaren Systemstrom senken, und diese Änderung kann eine Kernschiene während eines Arbeitslastspikes in einen Abfall ziehen. Designs, die jeden Block isoliert bewerten, sehen oft in frühen Bench-Tests sauber aus und werden dann während der integrierten Stresstests, wenn alles gleichzeitig schaltet, erwärmt und verhandelt, zickig.
Auswahl und Integration
Schaltregler werden typischerweise gewählt, um die Dissipation zu reduzieren, jedoch können sie Welligkeit und EMV einführen, die in empfindliche Bereiche streuen. LDOs dämpfen oft Rauschen, aber die Kosten zeigen sich als Wärme, wenn der Spannungsraum großzügig ist oder der Strom nicht trivial ist.
• Schaltregler: höhere Effizienz, mehr Welligkeit/EMV-Managementarbeit
• LDOs: weniger Rauschen, höhere Wärmeabfuhr beim Absenken der Spannung
Ein Kompromiss, der häufig gut funktioniert, besteht darin, einen Buck zum Erstellen einer Zwischenleitung zu verwenden und dann einen LDO für die endgültige empfindliche Leitung zu verwenden, solange der Spielraum und das thermische Verhalten absichtlich eingeplant wurden, anstatt nach anderen Entscheidungen übrig zu bleiben.
Schnelle Lastwechsel erfordern schnelle Regelkreise, eine angemessene Kompensationsgestaltung und ausreichend Ausgangskapazität, um eine stabile Regelung während der ersten Mikrosekunden der Reaktion aufrechtzuerhalten. Die Auswahl der Kondensatoren umfasst mehr als nur die Erhöhung der Kapazität. Die effektive Kapazität kann aufgrund von DC-Vorspannung, Temperaturänderungen und Alterung abnehmen. ESR und ESL beeinflussen auch die Stabilität des Schaltkreises, die transiente Antwort und die EMV-Leistung, was sie zu wichtigen Entwurfsüberlegungen macht.
Teams, die mit dem genau vorgesehenen Keramiktyp, der Spannungsbewertung und der Gehäusegröße validieren, tendieren dazu, Überraschungen in der Stabilität in der späten Phase zu vermeiden, insbesondere wenn Lieferketten vergleichbare Substitutionen erzwingen, die nur auf dem Papier vergleichbar sind.
Das Verhalten von PMICs unter Fehlern kann nach verschiedenen Philosophien gestaltet werden. Ein Ansatz versucht eine sanfte Degradation, mit der Handhabung von Unterspannung, Drosselhinweisen für den Prozessor, selektivem Entleeren von Schienen, damit das System in einem reduzierten Modus weiterhin verwendbar bleibt. Ein anderer Ansatz erzwingt ein deterministisches Herunterfahren, um schnell einen bekannten sicheren Zustand zu erreichen.
• Sanfte Degradation: häufig ausgerichtet auf die Nutzererfahrung in Konsumprodukten
• Deterministisches Herunterfahren: häufig ausgerichtet auf vorhersehbares Verhalten in sicherheitsorientierten Designs
Der PMIC, der am besten passt, ist normalerweise derjenige, dessen Sequenzierung und Fehlerantworten dem beabsichtigten Verhalten des Produkts entsprechen, nicht derjenige, der zufällig die längste Checkliste bewirbt.
Höhere Schaltfrequenzen und weite Bandlücken in Leistungsstufen erhöhen die erreichbare Leistungsdichte, sie stellen jedoch auch strengere Anforderungen an das PCB-Layout und eine höhere EMV-Empfindlichkeit. Gleichzeitig werden Softwarefunktionen wie Telemetrie, Interrupts, Protokollierungsfunktionen und programmierbare Steuerungsrichtlinien zu wichtigen Faktoren im gesamten Management und der Integration von Energieversorgungssystemen.
PMICs, die ein vorhersehbares Leistungs Verhalten unter realen Arbeitslasten aufrechterhalten, können die Fehlersuche erheblich reduzieren, insbesondere in Systemen, die Radios, Prozessoren, Ladeoperationen und thermische Grenzen gleichzeitig verwalten.
PMIC-Anwendungsbereich
PMICs erscheinen überall dort, wo elektrische Energie umgewandelt, verteilt, sequenziert, beobachtet und geschützt werden muss, während Verluste und Störungen unter Kontrolle gehalten werden. Sie werden routinemäßig in Verbraucher-, Unternehmens-, Automobil- und Industriedesigns eingesetzt, aber die Trennlinie liegt normalerweise nicht im Endmarkt, sondern darin, wie der Leistungspfad in der Praxis aussieht. In dem Moment, in dem ein Produkt mehrere Schienen mit unterschiedlicher Rauschverträglichkeit, unterschiedlichem Step-Load-Verhalten und unterschiedlichen Fehlererwartungen enthält, hört der PMIC auf, sich wie eine "Bauteilwahl" anzufühlen, und beginnt, wie eine gestaltende Kraft auf das Systemverhalten zu wirken. In vielen realen Designs schränkt die Leistung Architektur ein, was die Plattform konsistent liefern kann, selbst wenn die Berechnung und die Software auf dem Papier solide aussehen, sobald ein Hochleistungsprozessor mit Radios, Sensoren, Speicher und Hochgeschwindigkeits-I/O kombiniert wird.
Wo PMIC-Verhalten die realen Systemergebnisse begrenzt
Lasttransienten-Antwort, die leise die Obergrenze festlegt
Moderne CPUs und GPUs ziehen abrupte Stromsprünge während Boost- und Burst-Aktivitäten, und diese Sprünge können überraschend unerbittlich sein. Wenn der Regelkreis des PMIC, die Ausgangskapazität und die Verteilungsimpedanz die Schiene nicht innerhalb enger Grenzen halten können, reagieren Softwareteams oft auf subtile, aber kostspielige Weise: Sie verkürzen Boost-Fenster, kürzen Spitzenfrequenzen oder fügen breitere Schutzbänder ein, damit Abstürze nicht im Feld auftreten. Aus ingenieurtechnischer Sicht kann dieser Handel frustrierend erscheinen, da die Plattform effizient aussehen kann, während sie dennoch Leistung unter realistischem Verkehr auf dem Tisch lässt.
Teams, die nur mit statischen Lasten oder ordentlichen Labormustern validieren, lernen dies oft zu spät. Reale Arbeitslasten erzeugen gezackte Kanten: kurze Gaming-Spitzen, KI-Inferenzspitzen und Ereignisse der Funkkoexistenz können Spannungsabfälle erzeugen, die bei der Übung mit einem harmlosen Bench-Profil nie auftraten. Die unbequeme Lektion ist, dass wiederholbares transientes Verhalten bei chaotischen Arbeitslasten oft mehr nutzbare Leistung erwirbt, als das Verfolgen einer schmeichelhaften Effizienz-Zahl an einem einzigen Betriebspunkt.
Ripple und Breitbandrauschen, das sich in Signalintegritätsverschuldung verwandelt
Ripple sollte nicht nur als analoge Leistungsparameter betrachtet werden. Schalt-Harmoniken und Breitbandrauschen können die ADC-Auflösung beeinträchtigen, das RF-Phasengeräusch erhöhen und die SERDES-Signalspanne verringern, insbesondere wenn Leistungsleitungen Rückführungspfad teilen oder durch Paket- und PCB-Induktivität gekoppelt sind. Eine Leistungsleitung, die bei Einzel-线路测试 sauber erscheint, kann in der Nähe von Hochgeschwindigkeits-Schnittstellen, Antennen oder dichten Speichersektionen sehr unterschiedlich reagieren.
Die Realitäten des Layouts ändern auch die Geschichte. Mechanische Einschränkungen und Ausschlusszonen zwingen zu Kompromissen, und diese Kompromisse können Kopplungswege verstärken, die in einem idealen Layout unsichtbar waren. In der Praxis erwirbt eine Stromversorgung Vertrauen, wenn sie stabil und ruhig bleibt unter imperfect placement und nicht idealer Verdrahtung, nicht nur, wenn sie in einer besten Fall-Demokonfiguration gemessen wird.
Start-up und Sequenzierung, die Zuverlässigkeitsergebnisse prägen
Die Reihenfolge des Hochfahrens und das Anstiegsverhalten entscheiden, ob das Speicherschulung konsistent abgeschlossen wird, Funkgeräte ohne seltsame Eckenfehler kalibriert werden und immer aktive Bereiche stabil durch Stromausfälle bleiben. Marginale Sequenzierungen produzieren oft das Art von Fehlerbild, das Zeit und Moral erschöpft: „eine in fünfzig Booten“, schwer zu reproduzieren und noch schwieriger zu debuggen, wenn das System vollständig integriert ist.
Sequenzierungen funktionieren tendenziell besser, wenn sie als Teil des Rücksetz- und Wiederherstellungsverhaltens behandelt werden, anstatt als spätere Checkliste. Designs, die in der Produktion standhalten, behandeln normalerweise den vollständigen Hochlauf-/Herunterlaufpfad als wiederholbare Zustandsmaschine und beweisen es unter ungünstigsten Anstiegsraten, kalten Temperaturen und niedrigen Batteriezuständen. Automatisiertes Stromzyklus ist oft dort, wo Vertrauen gewonnen wird, weil es die intermittierenden Kanten aufdeckt, die ein paar manuelle Stromumschaltungen nie offenbaren.
Auswahlkriterien als System-Handelsraum
Effizienz, die über Modi hinweg bewertet wird, nicht als Trophäen-Zahl
Effizienz ändert die Bedeutung, abhängig davon, wie das Produkt tatsächlich seine Zeit verbringt. Die Effizienz bei Höchstlast mag in den Spezifikationen beeindruckend erscheinen, aber die tatsächliche Akkulaufzeit und thermische Leistung hängen von vielen Betriebsbedingungen ab, einschließlich Burstverarbeitung, normaler Last, leichter Last und Tiefschlafbetrieb. Schaltverluste, Leitungsverluste und Ruhestrom konkurrieren in jeder Region anders, und der „Gewinner“ wechselt mit dem Arbeitslastprofil.
Für designs mit Batteriebetrieb zeigen sich niedriger Iq und starke Effizienz bei leichter Last oft direkt als längere Zeit zwischen den Ladevorgängen, was den Produktteams auf sehr konkrete Weise wichtig ist. Für Server und Netzwerkgeräte dominieren in der Regel Leitungsverluste und thermische Einschränkungen, da nachhaltiger Strom und Wärmeabfuhr zur täglichen Realität werden. Eine fundierte Möglichkeit zur Entscheidungsfindung besteht darin, Effizienzziele auf die Zeitverteilung der Arbeitslasten zu mappen, anstatt einen Betriebspunkt zu optimieren, der fast nie im Feld vorkommt.
Thermischer Spielraum, der die Leistung daran hindert, unter Hitze zusammenzubrechen
Thermische Grenzen definieren häufig den maximalen nachhaltigen Strom, der wiederum die maximale nachhaltige Berechnung definiert. Ein PMIC kann elektrisch hervorragend aussehen und dennoch systematische Ziele verfehlen, wenn sein Gehäuse, Kupfer und Platzierung lokale Hotspots in der Nähe von Speicher, Abschirmdosen oder temperaturempfindlichen RF-Blöcken erzeugen. In realen Baugruppen können kleine Temperaturerhöhungen das Herabstufen des Verhaltens, schützende Schwellenwerte oder langfristige Zuverlässigkeitsbedenken auslösen, die nach dem Launch niemand erklären möchte.
Designs, die gut altern, planen in der Regel für thermische Spielräume. Diese Planung zeigt sich oft als thermische Eigenschaften des Gehäuses, die zur Last passen, Multi-Phasenfähigkeit, wenn das Stromprofil es rechtfertigt, und eine Layoutstrategie, die Wärme verteilt, während sie die Stromschleifen kurz genug hält, um zu vermeiden, dass thermische Lösungen in Rauschprobleme umschlagen.
EMI-Einschränkungen, die den Zeitplan und die Iterationskosten in die Höhe treiben
Schaltfrequenzen, Flankensteigungen und Steuerungstopologie beeinflussen stark, ob EMI mit einfacher Filterung behandelt werden kann oder zu einem Zyklus von Platinen-Drehungen und nächtlichen Laborsitzungen wird. Die Einhaltung der Spezifikation ist nur ein Teil der Geschichte; Layoutsensitivität kann Ergebnisse dominieren. Eine Lösung, die nahe perfekte Schleifen-Geometrie erfordert, kann zu einem Glücksspiel werden, wenn mechanische Einschränkungen awkward placement erzwingen.
Viele Teams bevorzugen letztendlich eine etwas langsamere, kontrollierbare Lösung, eine mit handhabbaren Anstiegsraten und vorhersehbarem spektralem Verhalten, da dies die Debug-Zeit reduziert und das Zertifizierungsrisiko senkt. Diese Wahl mag konservativ erscheinen, doch sie entspricht oft der Realität, dass EMI-Probleme meist spät auftreten, wenn der Zeitplan am wenigsten nachgiebig ist.
Schutzeigenschaften, die die Fehlersituation und das Serviceverhalten bestimmen
Das Schutzverhalten wirkt sich stark auf die Systemreaktion während Fehlersituationen aus. OCP-, OVP-, OTP- und Kurzschlussschutz-Einstellungen können bestimmen, ob das System einen sauberen Shutdown durchführt, in den Latch-Off-Modus übergeht oder wiederholt mit instabilem Verhalten neu startet. Diese Reaktionen beeinflussen direkt die Schwierigkeiten bei der Fehlersuche, die Unterstützungsanforderungen und die allgemeine Wahrnehmung der Produktzuverlässigkeit.
Die Schutzeinstellungen interagieren auch mit normalen Betriebsereignissen. Aggressive Strombegrenzung kann das Risiko von Schäden verringern, kann jedoch auch wiederholte Rücksetzungen während starker Einschaltströme oder Spannungsstößen beim Start auslösen. Das Fehlermanagement funktioniert typischerweise am besten, wenn es als Teil der vorgesehenen Service-Strategie abgestimmt ist, wobei entschieden wird, was erneut versucht werden soll, was latchen soll, was protokolliert werden soll und was schnell fehlschlagen soll, anstatt als Standard-Registerwerte belassen zu werden.
Integrationskosten, die Firmware, Validierung und die Debug-Realität umfassen
Die Integrationskosten hören selten bei der Stückliste und der PCB-Fläche auf. Sie umfassen Firmware-Arbeiten, den Umfang der Validierung, Testzeiten, die Robustheit der Fertigung und die Debug-Lasten, wenn etwas nicht wie erwartet funktioniert. Hochintegrierte PMICs können die Anzahl der Komponenten verringern, was ansprechend ist, konzentrieren jedoch auch das Risiko: Eine späte Anpassung an einer Schiene kann die Neuqualifizierung eines größeren Teils des Strombaums auslösen, als das Team eingeplant hat.
Diskretere Ansätze können den Layoutaufwand und das Teilemanagement erhöhen, jedoch bieten sie möglicherweise Modularität und einfachere Substitution, wenn sich die Bedingungen der Lieferkette ändern oder midlife Updates erwartet werden. Die ehrlichere Auswahlbrille ist die Risikobereitschaft des Programms: Terminsensitivität, erwartete Iterationsanzahl und wie oft das Design wahrscheinlich nach der ersten Veröffentlichung überarbeitet wird.
Digitale Leistungseigenschaften: Flexibilität, die mit Auflagen verbunden ist
Telemetrie, programmierbare Schienen und dynamische Spannungsanpassung können echte Vorteile bringen: engere Energieoptimierung, klarere Fehlermeldungen und adaptive Leistungsanpassung, die die Arbeitslast und die Temperatur verfolgt. Gleichzeitig ziehen diese Funktionen Abhängigkeiten von Firmware, Konfigurationskontrolle, Disziplin in der Produktionsprogrammierung und völlig neue Fehlermodi mit sich, die in einfacheren analogen Konfigurationen nicht existieren. Telemetrie wird nur dann wertvoll, wenn die gesammelten Daten aktiv zur Überwachung und für Entscheidungen im Design genutzt werden, anstatt ungenutzt in Diagnosedashboards zu verbleiben.
Aus praktischer Sicht verdient die digitale Leistung ihr Geld, wenn sie einen messbaren Kreislauf schließt. Wenn Programmierbarkeit verwendet werden kann, um den Ertrag zu steigern, die Akkulaufzeit zu verlängern oder thermisches Drosseln mit kontrollierten Richtlinien zu verhindern, wird sie zu einem starken Hebel. Wenn sie nur aktiviert wird, weil sie verfügbar ist, verwandelt sie sich oft in ungenutzte Konfigurationsfläche, die die Validierung kompliziert, das Risiko von Fertigungsfehlkonfigurationen erhöht und Unklarheiten darüber schafft, welche Einstellungen wirklich beabsichtigt sind.
Ein praktischer Auswahl- und Validierungsfluss, der das Systemverhalten verfolgt
Ein Arbeitsablauf, der unter Druck standhält, beginnt mit den Zielen des Systemverhaltens, anstatt einen PMIC-Katalog zu durchsuchen und zu hoffen, dass die Passform später funktioniert. Er zerlegt das Problem in konkrete, testbare Teile und zwingt zu Klarheit darüber, was gutes Verhalten bedeutet, bevor das Board hochgefahren wird.
• Konvertieren Sie Arbeitslasttransienten in Schienenanforderungen (zulässiger Abfall, Eingangszeit, Spitzenstrom, Wiederholrate).
• Definieren Sie Geräuschbudgets für empfindliche Blöcke (ADC, PLL, SERDES, RF) und ordnen Sie sie den Ripple-Grenzen und Layout-Annahmen zu.
• Geben Sie Sequenzierung, Rücksetzabhängigkeiten und Brownout-Wiederherstellung als einen Zustandsautomat an.
• Bewerten Sie das EMI-Risiko frühzeitig unter Verwendung realistischer Platzierungsbeschränkungen und des beabsichtigten Abschirmungsansatzes.
• Validieren Sie das Schutzverhalten mit Fehlerinjects, die realen Kurzschlüssen, Kabelereignissen und der Batteriedepression ähneln.
ADC / PLL / SERDES / RF
Dieser Ansatzstil reduziert Überraschungen in der späten Phase, da er den PMIC als das Mechanismus betrachtet, das das Leistungs Verhalten auf Systemebene regelt, nicht als eine Hintergrundanwendung. Wenn die Leistung als Subsystem erster Klasse entworfen wird, wird die Leistung konsistenter, die Zuverlässigkeit ist leichter mit Daten zu verteidigen und die Konformitätsarbeit ist tendenziell vorhersehbarer, während das Team weniger Zeit damit verbringt, intermittierende Fehler zu verfolgen, die in den Schienen und nicht in der Logik oder Software ihren Ursprung haben.
Zukünftige Richtungen für PMICs
Höhere Leistungsdichte und niedrigere Kernspannungen lassen PMICs mit engeren elektrischen Spielräumen und weniger Toleranz für Verzögerungen regeln. Da die Versorgungsschienen näher am minimalen Betriebspunkt einer digitalen Last liegen, kann selbst eine moderate Absenkung als weiche Fehler, Rücksetzungen oder Leistungsdrosselung erscheinen, die sich während des Systemstarts „mysteriös“ anfühlt. Dies lenkt allmählich die Designaufmerksamkeit von der Genauigkeit einer Schiene im stationären Zustand hin zu deren Verhalten während der schlimmsten, schnell wechselnden Lastereignisse.
Teams stoßen oft auf eine unangenehme Realität: Ein Loop, der auf der Bank ruhig aussieht, kann sich im Produkt schlecht verhalten, sobald reale Arbeitslasten scharfe Laststufen, lokale Heizstellen und ungleichmäßige Phasenstromverteilung erzeugen. Ein resilientes Muster besteht darin, das Loop-Design, die Auswahl der Leistungsstufen und die PDN-Impedanz als ein einziges gekoppeltes System zu betrachten und das Verhalten mit repräsentativen Arbeitslastsignaturen zu überprüfen, anstatt mit sauberen, idealisierten Pulsen.
Schnellere Transienten ziehen Designs natürlich zu engeren Schleifen, jedoch machen engere Schleifen Designs auch anfälliger für parasitäre Induktivität, Toleranzstapel und Messrauschen, das anfangs leicht unterschätzt werden kann. In vielen Programmen kommt der Unterschied zwischen stabil und feldstabil von verbesserten KleinSignalsmodellierung, glaubwürdiger Strommessung und einer Kompensation, die mit dem Bewusstsein über das reale Layout abgestimmt ist.
Die Erhöhung der Schaltfrequenz kann helfen, übersetzt sich jedoch nicht automatisch in ein besseres Transientenverhalten, wenn der Messpfad und die PCB-Geometrie die zusätzliche Bandbreite nicht unterstützen können. Wenn dieses Missverhältnis auftritt, wird die Schleifenverstärkung zum Verstärken von Rauschen verwendet, was sich als jitteriges Schalten, hörbare Artefakte in bestimmten Betriebsmodi oder EMI-Spitzen zeigen kann, die erst nach mechanischer Integration auftreten.
Moderne Berechnungs- und Verbindungskomponenten erzeugen eine Nachfrage, die sprunghaft und zusammengesetzt ist, sodass die Transientenvalidierung zunehmend widerspiegelt, was Software und Radios tatsächlich tun, anstatt was ein Lastkasten mit einem einzigen Schritt annähern kann.
Viele Teams nähern sich einem Workflow an, der kombiniert:
• Laborlaststeigerung
• Plattform-Telemetrieprotokolle
• Iterative Aktualisierungen der Kompensations- und Entkopplungsauswahlen.
Dieser Ansatz neigt dazu, Überraschungen in der späten Phase zu reduzieren, insbesondere wenn thermische Grenzen allmählich das elektrische Verhalten umgestalten und die Spielräume im Laufe der Zeit verschieben.
Der Druck, die Größe zu verringern und gleichzeitig die Leistung zu verbessern, führt dazu, dass die Integration in das Gehäuse und die umgebende Struktur ausgeweitet wird, nicht nur in den Chip. Fortschrittliche Verpackungen und eingebettete passive Komponenten können die Hoch-di/dt-Schleifen verkürzen, Parasiten reduzieren und die Transientenreaktion auf eine Weise straffen, die sich während des Debuggen sofort messbar anfühlt. Integrierte Magnetiken können die Leistungsdichte weiter erhöhen, aber der Vorteil wird oft durch thermische Pfade, mechanische Einschränkungen und wie die Kopplung sich ändert, sobald das Design in seinem realen Gehäuse ist, begrenzt.
In eingesetzten Produkten kommen die nachhaltigsten Gewinne aus der Integration häufig von der Reduzierung der Empfindlichkeit gegenüber Fertigungsvariationen und der Stabilisierung der Leistung über die Fertigungsstreuung, anstatt einfach die Materialkosten zu senken.
Die Auswahl des Gehäuses spiegelt zunehmend elektrische und thermische Ergebnisse wider, darunter niedrigere Schleifeninduktivität, verbesserte Wärmeverteilung und vorhersehbarere Impedanzkontrolle. Eine häufige Lehre aus dem Feld ist, dass zwei Leiterplatten mit demselben Schaltplan in ihrem Verhalten scharf divergieren können, wenn ein Design eine kompakte Stromschleife bewahrt und das andere den Strompfad über die PCB verteilt.
Da die Systemintegration zunimmt, wird die Layout-Planung oft früher in der Entwicklung priorisiert, da spätere Komponentenänderungen Probleme, die durch schlechte Geometrie oder PCB-Routing verursacht werden, nicht immer korrigieren können.
Integrierte Magnetiken können die Effizienz bei höherer Frequenz steigern und die Z-Höhe reduzieren, was bei eng verpackten Produkten ansprechend ist. Gleichzeitig können sie neue Kopplungswege einführen und thermische Hotspots erzeugen, die bis zu späten Prototypen schwer zu erkennen sind. Designs, die reibungslos ablaufen, behandeln normalerweise die Induktivität und das Gehäuse als ein kombiniertes Thema der EMI- und Thermokonstruktion, einschließlich Platzierungsentscheidungen in der Nähe von Antennen, Hochgeschwindigkeitsverbindungen und empfindlichen Sensoren.
Die EMI-Praxis bewegt sich weg von rein statischen Milderungen hin zu Kontrollstrategien, die Betriebskonditionen antizipieren. Techniken wie Frequenzsprungmodulation, intelligenteres Gate-Driving und reichhaltigere On-Chip-Sensoren können Spitzen reduzieren, erfordern jedoch auch Koordination, um nicht einfach hohe Emissionen gegen Breitbandrauschen oder Funkinterferenzen zu tauschen.
Viele Teams haben gesehen, wie sich die Sequenz abspielt: frühe EMI-Prüfungen bestehen, dann scheitern spätere Builds, wenn mehrere Regler in korrelierten Mustern schalten, wenn ein neuer Firmware-Zeitplan die Arbeitslastzeit ändert oder wenn Kabel und Abschirmungen die Rückführungspfad verschieben. Diese Erfahrungen schärfen das EMI-Denken auf die Plattformebene anstatt jeden Regler als isolierte Box zu betrachten.
Wenn sich die Schaltkanten schneller bewegen, beeinflusst die dv/dt-Steuerung zunehmend sowohl Emissionen als auch langfristige Belastungen. Gate-Treiber fügen mehr Programmierbarkeit hinzu, und die Schutzlogik wird zunehmend kontextbewusst, was das Abstimmen mehr wie Systemtechnik als wie Komponentenwahl erscheinen lassen kann.
Eine praktische Gewohnheit, die Zeit spart, ist, die Randgeschwindigkeiten mithilfe von Messungen in der endgültigen mechanischen Konfiguration abzustimmen, da Abschirmungen, Kabelbäume und Erdstrukturen oft das EMI-Ergebnis auf Weisen verändern, die ein nacktes Board nicht enthüllt.
Verbesserte On-Chip-Sensorik ermöglicht adaptive Verhaltensweisen wie die Anpassung des Schaltverhaltens, wenn Emissionen eine Grenze erreichen oder wenn der Betriebsmodus wechselt. Im Laufe der Zeit lenkt dies PMICs von einem festen Funktionsverhalten hin zu verwalteten Subsystemen, die kontinuierlich Leistung, Geräusch- und Wärmebedingungen basierend auf Feedback anstelle von Annahmen aushandeln.
Batteriebetriebene Systeme verfolgen weiterhin extrem niedrigen Ruhestrom und starke Effizienz bei geringer Last mithilfe von Techniken wie PFM/Burstbetrieb, Diodenemulation und automatischer Moduswahl. Die emotionale Spannung, die viele Teams erkennen, besteht darin, dass die gleichen Lastmodi, die auf einem Datenblatt großartig aussehen, Welligkeit, hörbare Artefakte oder intermittierende EMI-Signaturen einführen können, die sofort auffallen, auch wenn die durchschnittliche Effizienz ausgezeichnet aussieht.
Um Mehrdeutigkeit zu reduzieren, definieren Teams zunehmend, was akzeptables Standby-Verhalten in konkreten Begriffen bedeutet, und wählen dann eine Modusstrategie, die dazu passt.
Häufig spezifizierte Ziele umfassen:
• Welligkeitsgrenzen im Schlaf-/Standby-Modus
• Aufweckverzögerung
• Akustische/Geräuschbeschränkungen
• EMI-Verhalten während periodischer Wartungsaktivitäten.
In der Praxis erzählt die Batterielebensdauer unter realistischen Arbeitszyklen oft die Geschichte zuverlässiger als Spitzenwerte der Effizienz, insbesondere wenn der Arbeitszyklus Schlaf, periodisches Aufwachen, Radioimpulse und Sensorsampling umfasst.
Der automatische Moduswechsel ist attraktiv, aber Übergänge können kurze Störungen verursachen, die in gemittelten Messungen verschwinden und sich nur als seltene Rücksetzungen oder intermittierende Geräuschbeschwerden zeigen. Designs, die sich im Feld „stabil“ anfühlen, benötigen oft zusätzliche Validierungsanstrengungen genau an den Grenzen zwischen PFM und PWM, einschließlich Aufwachsequenz, Sequenzverzögerungen und Laststufen unter Grenzbedingungen.
Ein wiederkehrendes Muster ist, dass die aggressivste Effizienz-Einstellung nicht immer die komfortabelste Produktwahl ist, wenn sie Welligkeit erzeugt, die je nach Bedingungen variiert, oder die Geräuschkopplung, die schwer reproduzierbar ist. Viele Teams entscheiden sich für eine Konfiguration, die eine geringe Menge an Effizienz aufgibt im Austausch für ein Verhalten, das über Temperatur, Fertigungsvariationen und Szenarien hinweg reproduzierbar ist, was oft das Integrationsrisiko senkt und die Unterstützung verringert.
Wenn Rechenplattformen skalieren, stützen sie sich zunehmend auf genaue Telemetrie, adaptive Spannungsregelung und Schutz, der über viele Schienen koordiniert wird. Telemetrie spielt eine praktische Rolle im Alltag der Ingenieurskunst: Sie kann die Inbetriebnahme verkürzen, die Ursachenanalyse beschleunigen und die Versuchung reduzieren, "nur für den Fall" zu überdesignen, indem sie offenbart, wo Spielraum tatsächlich vorhanden ist.
Telemetrie ist oft am wichtigsten, wenn sich die Bedingungen schnell ändern, nicht wenn die Schiene stabil und leicht zu messen ist. Zukünftige PMICs werden voraussichtlich das Abtastverhalten, die Filterwahl und die Zeitausrichtung verbessern, sodass Softwareentscheidungen die Realität enger verfolgen.
Ein Feinheit, die erfahrene Teams schätzen, ist, dass mehr Proben nicht automatisch nützlicher sind; Konsistenz, Kalibrierstabilität über Temperatur und klare Definitionen von Bandbreite und Latenz entscheiden oft darüber, ob die Daten mit Zuversicht bearbeitet werden können.
Mit mehr Schienen entsteht ein stärkerer Bedarf an koordiniertem Schutzverhalten, damit das System kohärent reagiert, anstatt schienenweise.
Der Schutzkoordinierung umfasst oft:
• OCP-Reaktionsverhalten
• OVP-Reaktionsverhalten
• UVP-Reaktionsverhalten
• OTP-Reaktionsverhalten
• Sequenzierungsabhängigkeiten
• Fehlerbehandlungsrichtlinien
• Statusübertragung zwischen PMICs
Reale Systeme fallen häufig nicht aus, weil ein Feature fehlt, sondern weil die Schienen unterschiedlich auf dasselbe Ereignis reagieren, was zu Brownout-Kaskaden oder Neustartschleifen führt, die frustrierend zu diagnostizieren sind. Ein koordinierter Fehlerbehandlungsansatz, geteilter Status plus ein einheitlicher Wiederherstellungsplan, entspricht besser dem, wie Plattformen unter Stress erwartet werden zu reagieren.
Die Einführung von GaN und SiC wird in Bereichen zunehmen, in denen Schaltfrequenz und Effizienz die Größe oder die Leistungsmerkmale wesentlich verändern. Schnellere Schaltungen können Magnetik verkleinern und die transiente Reaktion schärfen, erhöhen jedoch auch den dv/dt-bedingten Stress, die EMI-Sensibilität und die Anforderungen an das Gate-Treiber-Design und die Isolationsstrategie. Die Einschränkungen sind nicht rein elektrisch; sie beinhalten auch die Betriebsgrenzen im Hinblick auf Fertigungsvariationen und reale Fehlanwendungsszenarien, die die Teams ernst nehmen gelernt haben.
GaN- und SiC-Lösungen belohnen in der Regel präzise Gate-Ansteuerung, diszipliniertes Layout und Schutzmaßnahmen, die Überschwingen, Ringe und unbeabsichtigtes Einschalten verhindern. Eine praktische Erkenntnis, die immer wieder auftaucht, ist, dass die Qualität des Layouts die Auswahl des Bauteils dominieren kann; ein gut ausgeführtes Layout mit einem „modernen“ Bauteil kann ein hochwertiges Bauteil übertreffen, das in einer lauten, induktiven Schleife platziert ist.
Mit steigenden Schaltgeschwindigkeiten werden die Isolationswahl und die langfristigen Zuverlässigkeitsgrenzen in Entwurfsprüfungen und Qualifizierungsplanungen prominenter. Die Einführung beschleunigt sich in der Regel dort, wo Leistungssteigerungen klar zusätzlichen Entwurfsaufwand rechtfertigen, während kostensensitive oder geräuschempfindliche Produkte oft vorsichtiger agieren und klarere Beweise für den systemweiten Nutzen verlangen.
PMICs werden zunehmend so gestaltet, dass sie wie Richtlinienexecutoren fungieren, die Effizienz, Geräuschpegel, Thermik und Zuverlässigkeit in Echtzeit regeln. Die Architekturen, die sich im Laufe der Zeit bewähren, behandeln Energie als verwaltete Ressource: Die PMIC-Telemetrie informiert die Softwarepolitik, und die Softwarepolitik passt im Gegenzug die Betriebsarten und das Schienenverhalten des PMIC an. Dies verwischt die Grenze zwischen Hardware- und Firmware-Zuständigkeit auf eine Weise, die zunächst unangenehm erscheinen kann, sich jedoch oft auszahlt, indem die Margenreduzierung und die Belastbarkeit unter realen Arbeitslasten verbessert werden.
Schlussfolgerung
Effektiver Schaltkreisschutz hängt von mehr ab als nur von der Hinzufügung eines einzelnen Schutzelements. Zuverlässige Designs erfordern eine ordnungsgemäße Koordination zwischen Überspannungsableitung, Spannungsbegrenzung, Strombegrenzung, Erdung, Layout und Fehlerzeitmessung. Jedes Schutzgerät hat seine eigenen Stärken und Grenzen, sodass die Auswahl mit dem erwarteten Fehlertyp, dem Energieniveau, der Reaktionsgeschwindigkeit und der Betriebsumgebung übereinstimmen muss. Eine gut geplante Schutzstrategie verbessert die Sicherheit, reduziert das Ausfallrisiko und unterstützt die langfristige Zuverlässigkeit in realen elektronischen Systemen.
Häufig gestellte Fragen (FAQ)
1. Warum wird ein PMIC als systemweiter Leistungskoodinator und nicht nur als Spannungsregler angesehen?
Ein PMIC tut weit mehr, als eine Spannung in eine andere umzuwandeln. Er verwaltet, wie mehrere Schienen generiert, sequenziert, überwacht, verteilt und geschützt werden, und zwar im gesamten System. In praktischen Designs koordiniert der PMIC die Prozessorkanäle, den Arbeitsspeicher, RF-Abschnitte, Sensoren und Peripheriebereiche, während er auch den Startzeitpunkt, die Fehlerrückführung, thermische Ereignisse und das Power-Good-Signal behandelt. Da sich all diese Verhaltensweisen während des Bootvorgangs und der Laufzeit im Betrieb gegenseitig beeinflussen, wird der PMIC oft zu einem der Hauptfaktoren, die die Systemzuverlässigkeit und -stabilität prägen.
2. Warum treten PMIC-bezogene Ausfälle oft nur unter realen Arbeitslasten und nicht während einfacher Labortests auf?
Bench-Tests mit statischen Lasten reproduzieren selten das schnelle transiente Verhalten, das von modernen Prozessoren, RF-Sendern, Speichertrafi und Sensorimplosionen erzeugt wird. Unter realistischen Betriebsbedingungen erfahren die Schienen plötzliche Stromspitzen, die Schwächen in der transienten Reaktion, PCB-Parasitik, Kompensationseinstellung und Stabilität des Ausgangsnetzes aufdecken. Ein PMIC kann während kontrollierter Tests stabil erscheinen, aber später Drifts, Überschwingungen, Ringe oder Sequenzierungsfehler zeigen, sobald reale Arbeitslasten schnell wechselnde elektrische Anforderungen erzeugen.
3. Warum wird die Leistungssequenzierung als Systemvertrag statt als einfaches Startmerkmal betrachtet?
Viele digitale Systeme erfordern spezifische zeitliche Beziehungen zwischen Kernschienen, Speicherschienen, I/O-Versorgungen, Rücksetzen-Signalen und immer aktiven Bereichen. Wenn Schienen in der falschen Reihenfolge oder mit falscher Zeitfolge ansteigen, können Prozessoren, SRAM-Retentionsblöcke und Hochgeschwindigkeitsanschlüsse undefinierte Betriebsbedingungen betreten. Diese Probleme führen oft zu intermittierenden Bootfehlern, die nur bei extremen Temperaturen, Brownouts oder Batteriewarmanschlussbedingungen auftreten. Eine ordnungsgemäße Sequenzierung wird daher zu einer koordinierten Vereinbarung zwischen Hardware-, Firmware- und Siliziumanforderungen, anstatt ein Komfortmerkmal zu sein.
4. Warum kann die transiente Reaktion von PMICs leise die Leistung von CPUs und GPUs in der realen Welt einschränken?
Moderne Prozessoren erzeugen abrupte Stromstöße während des Boost-Betriebs, KI-Arbeitslasten, Gaming-Spitzen und Funkaktivität. Wenn der PMIC während dieser Ereignisse keine stabile Spannung aufrechterhalten kann, kann die Firmware die Boost-Dauer verkürzen, die Taktgeschwindigkeit senken oder die Timing-Margen erweitern, um Abstürze zu verhindern. In vielen Produkten reduzieren Leistungsabgabe-Limitationen lautlos die nachhaltige Leistung, obwohl der Prozessor selbst auf dem Papier fähig erscheint. Eine stabile transiente Antwort hat oft mehr Einfluss auf die nutzbare Systemleistung als nur die Spitzeneffizienzspezifikationen.
5. Warum schaffen Ripple- und Schaltgeräusch von PMICs Probleme, die weit über das Stromversorgungs-Subsystem hinausgehen?
Schalt-Harmonischen und Breitbandgeräusche können in RF-Schaltungen, ADC-Referenzen, PLLs, SERDES-Verbindungen und empfindliche analoge Pfade über gemeinsam genutzte Erdimpedanzen und PCB-Parasitiken einkoppeln. Selbst relativ kleine Ripple-Niveaus können die Genauigkeit des ADC verringern, Phasenrauschen erhöhen, die Timing-Marge verringern oder die Zuverlässigkeit der Hochgeschwindigkeitskommunikation verschlechtern. Eine Schiene, die elektrischer akzeptabel aussieht, kann ernsthafte Signalintegritätsprobleme verursachen, sobald sie in dichten Mixed-Signal-Systemen integriert wird.
6. Warum definieren häufig die thermischen Einschränkungen von PMICs die maximale nachhaltige Rechenleistung?
Wenn die Temperatur des PMIC steigt, sinkt die Effizienz und thermische Schutzmechanismen können beginnen, den verfügbaren Strom zu reduzieren oder das Rückfaltungverhalten auszulösen. In kompakten Systemen können lokalisierte Hotspots in der Nähe von Prozessoren, Speicher oder RF-Bereichen den PMIC in die thermische Herabstufung zwingen, lange bevor die theoretischen elektrischen Grenzen erreicht sind. Aufgrund dessen hängt die nachhaltige Systemleistung oft ebenso sehr von der thermischen Anordnung, der Kupferverteilung und der Paketauswahl ab wie von den Spezifikationen der Regler selbst.
7. Warum kombinieren Ingenieure oft Buck-Wandler mit LDO-Reglern in empfindlichen Designs?
Buck-Wandler ermöglichen eine effiziente Spannungsreduktion für Hochstromschienen, bringen jedoch Schalt-Ripple und EMI mit sich. LDOs erzeugen eine viel sauberere Ausgangsspannung mit geringerem Geräusch, setzen jedoch mehr Wärme frei, wenn sie größere Spannungen absenken. Ein häufiger Kompromiss verwendet einen Buck-Wandler, um eine Zwischenleitung effizient zu erzeugen, gefolgt von einem LDO zur Reinigung der finalen empfindlichen analogen oder RF-Versorgung. Diese Kombination balanciert Effizienz, thermisches Management und Rauschreduktion effektiver aus, als sich auf eine der beiden Topologien allein zu verlassen.
8. Warum werden die Fehlreaktionsrichtlinien von PMICs als Teil des gesamten Produkterlebnisses angesehen?
Das Fehlverhalten bestimmt, ob das Produkt sauber herunterfährt, in eine Neustart-Schleife eintritt, sich elegant drosselt oder während abnormaler Bedingungen instabil wird. Überstromschutz, thermischer Abschaltmechanismus, Handhabung von Unterspannungen und Wiederherstellungsverzögerung beeinflussen direkt, wie Erfahrungen mit Batteriefehlern, Kabelproblemen oder Überlastereignissen auftreten. Gut gestaltete PMIC-Richtlinien isolieren Fehler vorhersehbar und erholen sich auf kontrollierte Weise, wodurch die Servicekomplexität verringert und verhindert wird, dass kleinere Probleme zu systemweiten Ausfällen eskalieren.
9. Warum verlassen sich moderne PMICs zunehmend auf Telemetrie und programmierbare Leistungsrichtlinien?
Moderne Systeme ändern in Echtzeit dynamisch Arbeitslasten, thermische Zustände, Funkaktivität und Ladeverhalten. Die PMIC-Telemetrie ermöglicht es der Firmware, die Schienenzustände, den Stromverbrauch, die Temperatur und Fehlerereignisse kontinuierlich zu überwachen. Diese Daten ermöglichen adaptive Spannungsanpassungen, thermisches Management, intelligentes Drosseln und koordinierte Schutzentscheidungen. Programmierbare Leistungssysteme bringen jedoch auch neue Validierungskomplexitäten mit sich, da falsche Firmware-Konfigurationen Fehler erzeugen können, die in festen analogen Designs nicht auftreten.
10. Warum bewegen sich zukünftige PMIC-Designs in Richtung „Power Orchestration“ anstelle von einfacher Leistungsumwandlung?
Zukünftige PMICs werden zunehmend erwartet, Effizienz, Thermik, EMI-Verhalten, Schutz, Arbeitslastskalierung, Ladepolitik und Systemtelemetrie gleichzeitig zu koordinieren. Schnellere Schalttechnologien, engere Spannungsmargen und hochgradig dynamische Arbeitslasten erfordern, dass der PMIC sein Verhalten kontinuierlich an reale Betriebsbedingungen anpasst, anstatt sich auf statische Annahmen zu stützen. Diese Evolution verwandelt den PMIC in ein aktives Management-Subsystem, das eng mit Firmware und Systemsoftware zusammenarbeitet, um stabile, effiziente und vorhersehbare Plattformbetriebe unter sich ändernden Bedingungen aufrechtzuerhalten.
Verwandter Blog
-
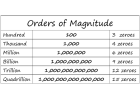
Wie viele Nullen in einer Million, Milliarden, Billionen?
![Wie viele Nullen in einer Million, Milliarden, Billionen?]()
2024/07/29
Millionen repräsentieren 106, eine leicht griffbare Figur im Vergleich zu alltäglichen Gegenständen oder jährlichen Gehältern. Milliarden, entspr... -
IRLZ44N MOSFET -Datenblatt, Schaltung, Äquivalent, Pinout
![IRLZ44N MOSFET -Datenblatt, Schaltung, Äquivalent, Pinout]()
2024/08/28
Der IRLZ44N ist ein weit verbreiteter N-Kanal-Power-MOSFET.Es ist bekannt für seine hervorragenden Schaltkapazitäten und eignet sich sehr für zahlr... -
Batteriestemperatur zu niedrig, das Laden gestoppt.Wie repariere ich es?
![Batteriestemperatur zu niedrig, das Laden gestoppt.Wie repariere ich es?]()
2024/10/6
Das Ladeproblemen von Mobiltelefonen sind häufig, können jedoch effektiv verwaltet werden.Die Temperatur spielt eine große Rolle bei der Batterieff... -
BC547 Transistor umfassender Leitfaden
![BC547 Transistor umfassender Leitfaden]()
2024/07/4
Der BC547 -Transistor wird üblicherweise in einer Vielzahl elektronischer Anwendungen verwendet, die von grundlegenden Signalverstärkern bis hin zu ... -
Umfassende Anleitung zum SCR (Siliziumgesteuerte Gleichrichter)
![Umfassende Anleitung zum SCR (Siliziumgesteuerte Gleichrichter)]()
2024/04/22
Siliziumkontrollierte Gleichrichter (SCR) oder Thyristoren spielen aufgrund ihrer Leistung und Zuverlässigkeit eine entscheidende Rolle in der Energi... -
LR621, SR621SW, 364, AG1 -Batterieäquivalente und Ersatz
![LR621, SR621SW, 364, AG1 -Batterieäquivalente und Ersatz]()
2024/07/15
Die Batterien von LR621- und SR621SW -Tasten sind in kompakten elektronischen Geräten wie Uhren, kleinen Spielzeugen, Taschenrechnern und Fernschlüs... -
Grundlagen von Op-Ampere-Schaltungen
![Grundlagen von Op-Ampere-Schaltungen]()
2023/12/28
In der komplizierten Welt der Elektronik führt uns eine Reise in ihre Geheimnisse ausnahmslos zu einem Kaleidoskop aus exquisiten und komplexen Schal... -
Ein vollständiger Leitfaden für Multiplexer und ihre Rolle in digitalen Systemen
![Ein vollständiger Leitfaden für Multiplexer und ihre Rolle in digitalen Systemen]()
2025/09/20
Multiplexer sind Komponenten in digitalen Systemen, mit denen mehrere Eingangssignale unter Verwendung binärer Logik- und Kontrollsignale in eine ein... -
Vergleich der Unterschiede und Anwendungen von NMOs und PMOS
![Vergleich der Unterschiede und Anwendungen von NMOs und PMOS]()
2024/11/15
Das Verständnis der Unterschiede zwischen NMOS- und PMOS -Transistoren ist wichtig für die Gestaltung effizienter Schaltkreise.NMOs (N-Type-Metallox... -
CR2450 gegen CR2032 Vergleich: Alles was Sie wissen müssen
![CR2450 gegen CR2032 Vergleich: Alles was Sie wissen müssen]()
2025/09/15
Button -Batterien wie CR2450 und CR2032 führen viele alltägliche Elektronik aus, von Uhren und Fernbedienungen bis hin zu medizinischen und industri...






Heiße Teile
- K4S511632B-TC75
- M52067FP
- RC82573L
- ACPM-9007-BLK
- ICS950812CGLF
- M28W800CB70ZB6
- IDT71V321L55PFI
- 08051A270FAT2A
- CL05B473KO5NNND
- HD6432635UA81FJ
- LX62UL256SC-45
- UVR1H470MED1TD
- MC14495P1
- AD5258BRMZ10
- CM200YE4-12F
- RN73C1E10K7BTDF
- MT89L80AP1
- XC9536PC44AEM-15C0001
- DMN2046U-7
- CXB1443R-T4
- NT7167FG-00033
- CY7C68013A-128AXC
- SN74LVC2244ADGVR
- 74ACT843SPC
- RT1206DRD071KL
- NC7SZ332L6X
- LC1117CLTR18
- A42MX16-TQG176
- HY5DU283222AF-28
- M82520-14
- VI-2W0-CW/F1
- PI5A126U
- 06033A100JAT4A
- TAJT105M020RNJ
- XZFABBA10A
- LM1117IMP-5.0/NOPB
- ADE7878AACPZ-RL
- TLV320AIC24KIPFB
- AM3352BZCEA60
- STD4NK50ZT4
- T495D226M020ZTE200
- ICS1562BMLF
- K3RG4G40MM-MGCJT00E
- LCMX02-7000HC-4FG484I
- MC74HC4052AG
- UPD65029GD-083-5BB
- LM66100DCK
- SN27546YPHR.B1
- GLS85LS1002P-S-I-FZJE-TT095
- TPS826711SIP