- Deutsch
-
EnglishDeutschItaliaFrançais한국의русскийSvenskaNederlandespañolPortuguêspolski繁体中文SuomiGaeilgeSlovenskáSlovenijaČeštinaMelayuMagyarországHrvatskaDanskromânescIndonesiaΕλλάδαБългарски езикGalegolietuviųMaoriRepublika e ShqipërisëالعربيةአማርኛAzərbaycanEesti VabariikEuskeraБеларусьLëtzebuergeschAyitiAfrikaansBosnaíslenskaCambodiaမြန်မာМонголулсМакедонскиmalaɡasʲພາສາລາວKurdîსაქართველოIsiXhosaفارسیisiZuluPilipinoසිංහලTürk diliTiếng ViệtहिंदीТоҷикӣاردوภาษาไทยO'zbekKongeriketবাংলা ভাষারChicheŵaSamoa日本語SesothoCрпскиKiswahiliУкраїнаनेपालीעִבְרִיתپښتوКыргыз тилиҚазақшаCatalàCorsaLatviešuHausaગુજરાતીಕನ್ನಡkannaḍaमराठी
Vollständiger FIFO-Leitfaden: Funktionsprinzip und Entwurfstechniken
Katalog
Was ist FIFO?
Wie FIFO funktioniert
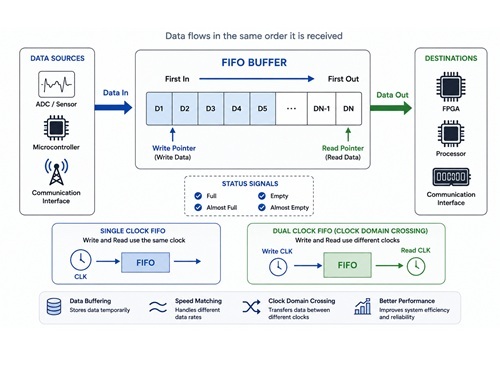
FIFO (First In, First Out) ist ein Speichermedium, bei dem die ersten Daten, die in einen Puffer geschrieben werden, auch die ersten Daten sind, die herausgelesen werden. Das Betriebsprinzip ähnelt einer Warteschlange. Daten gelangen in einer bestimmten Reihenfolge in den Puffer und bleiben gespeichert, bis sie gelesen werden. Die ältesten Daten verlassen immer zuerst den Puffer, während neuere Daten dahinter warten.
In FPGA- und ASIC-Systemen wird FIFO häufig als temporärer Speicherbereich zwischen Schaltungen verwendet, die Daten erzeugen, und Schaltungen, die Daten verbrauchen. Anstatt Daten direkt von einem Block zu einem anderen zu senden, werden eingehende Daten zuerst im FIFO gespeichert. Die empfangende Schaltung liest dann die gespeicherten Daten, wenn sie bereit ist. Dieser Ansatz hilft, einen kontinuierlichen und zuverlässigen Datenfluss aufrechtzuerhalten.
Im Gegensatz zum normalen Speicher benötigt FIFO keine externen Adressleitungen, um Speicherorte auszuwählen. Während einer Schreiboperation werden eingehende Daten automatisch an der nächsten verfügbaren Stelle im Puffer platziert. Während einer Leseoperation werden die ältesten gespeicherten Daten automatisch abgerufen und an den Ausgang gesendet.
Dieser Prozess wird von internen Schreibzeigern und Lesezeigern verwaltet. Wenn neue Daten geschrieben werden, bewegt sich der Schreibzeiger zum nächsten Speicherort. Wenn Daten gelesen werden, rückt der Lesezeiger zum nächsten verfügbaren Element vor. Da diese Zeiger automatisch arbeiten, benötigt FIFO weniger Steuerlogik als herkömmlicher Speicher.
Der Nachteil ist, dass Daten nur sequenziell abgerufen werden können. Im Gegensatz zu RAM kann FIFO nicht direkt auf einen bestimmten Speicherort zugreifen. Jede Leseoperation folgt genau der Reihenfolge, in der die Daten ursprünglich geschrieben wurden.
Warum FIFO in digitalen Systemen verwendet wird
FIFO wird häufig verwendet, wenn verschiedene Teile eines Systems mit unterschiedlichen Geschwindigkeiten arbeiten. In vielen Anwendungen erzeugt ein Gerät kontinuierlich Daten, während ein anderes Gerät diese Daten langsamer verarbeitet oder überträgt. Ohne temporären Speicher können eingehende Daten schneller ankommen, als sie verarbeitet werden können, was zu Datenverlust führt.
Zum Beispiel kann ein Analog-Digital-Wandler (ADC) kontinuierlich digitale Proben erzeugen, während ein Prozessor, PCI-Bus oder Kommunikationsschnittstelle diese Proben mit einer anderen Geschwindigkeit verarbeitet. Ein FIFO fungiert als Zwischenpuffer, der eingehende Daten speichert und sie freigibt, wenn die empfangende Schaltung bereit ist. Dies ermöglicht es beiden Seiten des Systems, unabhängig zu arbeiten, ohne Informationen zu verlieren.
FIFO kann auch Datenbreitenunterschiede zwischen Geräten beheben. In einigen Systemen kann ein Gerät 8-Bit-Daten ausgeben, während ein anderes 16-Bit-Daten erwartet. Eine direkte Kommunikation kann zusätzliche Umwandlungslogik erfordern, um die Daten umzustrukturieren.
Ein FIFO kann diesen Prozess vereinfachen, indem er die eingehenden Daten vorübergehend speichert und sie in einem Format präsentiert, das mit dem empfangenden Gerät übereinstimmt. Diese Fähigkeit hilft verschiedenen Hardwareblöcken, Daten effizient auszutauschen und gleichzeitig die Komplexität der Schnittstelle zu reduzieren.
Arten von FIFO
FIFO-Strukturen werden allgemein in synchrone FIFO und asynchrone FIFO unterteilt.
Ein synchrones FIFO verwendet ein einzelnes Taktsignal für sowohl Lese- als auch Schreiboperationen. Da alle Aktivitäten unter derselben Taktquelle stattfinden, sind die Timing-Beziehungen leichter zu verwalten und zu überprüfen. Synchrone FIFOs werden häufig verwendet, wenn Daten innerhalb eines einzigen Taktbereichs bleiben.
Ein asynchrones FIFO verwendet separate Takte zum Schreiben und Lesen. Daten können mit einer Taktfrequenz in das FIFO eingegeben und mit einer anderen ausgegeben werden. Da die beiden Takte unabhängig arbeiten, werden asynchrone FIFOs häufig zum Übertragen von Daten zwischen verschiedenen Taktbereichen verwendet.
Diese Fähigkeit ist besonders wichtig in FPGA-Systemen, in denen Prozessoren, Kommunikationsschnittstellen, Speichercontroller und Peripheriegeräte häufig mit unterschiedlichen Frequenzen arbeiten.
FIFO-Statussignale und Pufferverwaltung
Der zuverlässige Betrieb von FIFOs hängt davon ab, wie viel Daten derzeit im Puffer gespeichert sind. Wenn neue Daten ankommen, nachdem das FIFO die Kapazität erreicht hat, können gültige Informationen überschrieben werden. Ebenso führt der Versuch, Daten aus einem leeren FIFO zu lesen, zu ungültigen Ergebnissen.
Um diese Bedingungen zu verhindern, verwenden FIFO-Designs mehrere Statussignale.
Das Vollsignal zeigt an, dass alle verfügbaren Speicherorte belegt sind und keine zusätzlichen Daten geschrieben werden können. Das Leersignal zeigt an, dass keine gültigen Daten mehr zum Lesen vorhanden sind.
Viele FIFO-Implementierungen bieten auch fast volle und fast leere Indikatoren. Diese Signale dienen als frühe Warnungen, bevor das FIFO einen vollständig vollen oder vollständig leeren Zustand erreicht. Die Steuerlogik kann diese Signale nutzen, um Datenübertragungen zu verlangsamen, zu stoppen oder anzupassen, bevor Überlauf oder Unterlauf auftreten.
Da diese Statusindikatoren die Datenintegrität und Systemzuverlässigkeit direkt beeinflussen, sind sie ein wesentlicher Bestandteil des FIFO-Designs.
FIFO-Strukturen und ihre Unterschiede
Haupt-FIFO-Strukturen
FIFO-Strukturen werden allgemein in Single Clock FIFO (SCFIFO) und Dual Clock FIFO (DCFIFO) unterteilt. Diese Strukturen sind so konzipiert, dass sie unterschiedliche Taktbeziehungen und Datenübertragungsanforderungen unterstützen.
Die gängigsten FIFO-Strukturen sind:
• SCFIFO (Single Clock FIFO)
• DCFIFO (Dual Clock FIFO)
• DCFIFO Gemischte Breiten (Dual Clock FIFO mit unterschiedlichen Lese- und Schreibdatenbreiten)
In den meisten FPGA-Dokumentationen werden standardmäßige Dual-Clock-FIFOs und gemischte Breiten Dual-Clock-FIFOs beide als Dual-Clock-FIFOs kategorisiert, es sei denn, eine Unterscheidung ist erforderlich.
Die Auswahl einer FIFO-Struktur hängt hauptsächlich davon ab, wie Daten in den Puffer eingegeben und verlassen werden. Die Beziehung zwischen dem Schreib-Takt und dem Lese-Takt ist normalerweise der wichtigste Faktor bei der Wahl der geeigneten FIFO-Architektur.
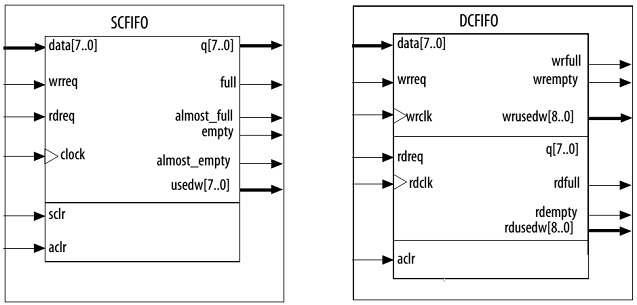
Single Clock FIFO (SCFIFO)
Ein Single Clock FIFO verwendet ein Taktsignal zur Steuerung von Schreib- und Leseoperationen. Da beide Prozesse innerhalb desselben Taktbereichs arbeiten, ist die Timingsteuerung relativ einfach, und Synchronisationsprobleme werden minimiert.
Wenn gültige Daten am FIFO-Eingang ankommen und ein Schreibanforderungssignal aktiviert wird, werden die Daten am nächsten verfügbaren Speicherort am aktiven Taktflanken gespeichert. Wenn weitere Daten eintreffen, bewegt sich der Schreibzeiger weiterhin vorwärts durch den FIFO-Speicherbereich.
Wenn ein Leseanfrage aktiviert wird, ruft das FIFO die ältesten gespeicherten Daten ab und gibt sie an den Ausgang weiter. Der Lesezeiger rückt dann zur nächsten gespeicherten Position vor. Diese kontinuierliche Bewegung der Lese- und Schreibzeiger ermöglicht es, Daten in der korrekten Reihenfolge durch das FIFO fließen zu lassen.
Single-Clock FIFOs bieten auch mehrere Statussignale, die helfen, die Pufferbedingungen zu überwachen. Das Vollsignal zeigt an, dass alle Speicherorte belegt sind und zusätzliche Schreibvorgänge gestoppt werden müssen. Das fast volle Signal warnt, dass das FIFO der Kapazität näher kommt.
Das Leersignal zeigt an, dass keine gültigen Daten mehr im Puffer verbleiben, während das fast leere Signal warnt, dass nur noch eine kleine Menge an Daten übrig ist. Viele Implementierungen beinhalten auch einen genutzten Wortzähler, der angibt, wie viele Daten derzeit im FIFO gespeichert sind.
Diese Indikatoren ermöglichen es der umgebenden Logik, sichere Lese- und Schreibentscheidungen zu treffen, während ein zuverlässiger FIFO-Betrieb aufrechterhalten wird.
Dual Clock FIFO (DCFIFO)
Ein Dual Clock FIFO verwendet separate Takte für Schreib- und Leseoperationen. Die Schreibseite arbeitet innerhalb eines Taktbereichs, während die Leseseite innerhalb eines anderen arbeitet.
Eingehende Daten werden mit dem Schreib-Takt in das FIFO geschrieben. Sobald sie gespeichert sind, verbleiben die Daten im Puffer, bis die Leseseite sie mit dem Lesetakt abruft. Da die beiden Takte unabhängig sind, kann das FIFO Daten sicher zwischen verschiedenen Taktbereichen übertragen.
Diese Fähigkeit macht Dual-Clock FIFOs zu einer der gängigsten Lösungen für den Taktbereichsübergang in FPGA-Systemen.
Um den zuverlässigen Betrieb zu unterstützen, bieten Dual-Clock FIFOs Statussignale für beide Seiten der Schnittstelle. Die Schreibseite verwendet häufig Signale wie wrfull und wrempty, um die Bedingungen des Schreibpuffers anzuzeigen. Die Leseseite verwendet häufig rdfull und rdempty, um die Datenverfügbarkeit zum Lesen anzuzeigen.
Separate Zähler werden ebenfalls häufig bereitgestellt, sodass jeder Taktbereich die Menge gespeicherter Daten unabhängig überwachen kann. Diese Indikatoren ermöglichen es beiden Seiten des FIFOs, Entscheidungen zu treffen, ohne sich gegenseitig zu stören.
Gemischte Breite Dual Clock FIFO
Einige Anwendungen erfordern unterschiedliche Datenbreiten auf der Schreib- und Leseseite des FIFOs. In diesen Situationen kann ein Gemischte Breite Dual Clock FIFO verwendet werden.
Beispielsweise können Daten als 16-Bit-Wörter in das FIFO geschrieben und als 8-Bit-Wörter gelesen werden. Das FIFO organisiert die gespeicherten Informationen automatisch um und führt die erforderliche Breitenkonvertierung durch, während die ursprüngliche Datenfolge beibehalten wird.
Diese Funktion ist nützlich, wenn Geräte mit unterschiedlichen Busbreiten verbunden werden. Anstatt separate Umwandelschaltungen hinzuzufügen, übernimmt das FIFO die Breitenanpassung intern.
Wann jede FIFO-Struktur verwendet werden sollte
Ein Single Clock FIFO wird normalerweise verwendet, wenn sowohl das Lesen als auch das Schreiben innerhalb des gleichen Taktbereichs erfolgen. Seine einfachere Architektur erleichtert die zeitliche Analyse und Implementierung.
Ein Dual Clock FIFO wird bevorzugt, wenn Daten zwischen unabhängigen Taktbereichen bewegt werden müssen. Es bietet einen zuverlässigen Taktbereichsübergang und hilft, Synchronisationsprobleme zu beseitigen.
Wenn sowohl ein Taktbereichsübergang als auch eine Breitenkonvertierung erforderlich sind, bietet ein Gemischte Breite Dual Clock FIFO eine effiziente Lösung, indem es beide Funktionen innerhalb einer einzigen FIFO-Struktur kombiniert.
FIFO-Funktionen in verschiedenen Strukturen
Warum FIFO in digitalen Systemen wichtig ist
FIFO fungiert als temporärer Speicherbereich zwischen verschiedenen Teilen eines digitalen Systems. In vielen Anwendungen kommen Daten nicht mit genau derselben Geschwindigkeit an und verlassen das System. Ein Gerät kann Daten kontinuierlich erzeugen, während ein anderes Gerät diese Daten mit einer langsameren Rate verarbeiten oder übertragen kann. Ohne einen Puffer zwischen ihnen können eingehende Daten schneller ansammeln, als sie verarbeitet werden können, was zu Datenverlust führt.
Ein FIFO löst dieses Problem, indem es Daten speichert, während sie ankommen, und sie freigibt, wenn die empfangende Schaltung bereit ist. Dies schafft einen flüssigeren Informationsfluss und ermöglicht es verschiedenen Teilen des Systems, effizienter zu arbeiten, ohne perfekte Zeitkoordination zu erfordern.
Neben einfacher Pufferung hilft FIFO auch, die Gesamtleistung des Systems zu verbessern. Durch das vorübergehende Sammeln von Daten vor der Übertragung reduziert FIFO die Anzahl der Buszugriffsoperationen und minimiert unnötige Kommunikationsüberhead. Dadurch können Systemressourcen effizienter genutzt werden.
FIFO kann auch die Arbeitslast des Prozessors reduzieren. Anstatt die CPU zu zwingen, jede einzelne Datenübertragung zu verarbeiten, können Daten im FIFO akkumuliert und in größeren Blöcken verarbeitet werden. Dieser Ansatz verbessert die Effizienz und entlastet Prozessorressourcen für andere Aufgaben.
Ein weiterer wichtiger Vorteil ist die Unterstützung von Direct Memory Access (DMA)-Operationen. In Hochgeschwindigkeitssystemen ermöglicht DMA, dass Daten direkt zwischen Peripheriegeräten und Speicher ohne ständige CPU-Beteiligung verschoben werden. FIFO bietet den temporären Speicher, der benötigt wird, um diese Übertragungen zu unterstützen und einen kontinuierlichen Datenstrom aufrechtzuerhalten.
Ohne FIFO-Pufferung und DMA-Unterstützung kann der Prozessor einen erheblichen Teil der Zeit damit verbringen, die Datenbewegung zu verwalten, was die Gesamtleistung des Systems reduzieren und das Risiko von Übertragungsengpässen erhöhen kann.
Single Clock FIFO
Ein Single Clock FIFO wird typischerweise verwendet, wenn sowohl der Schreibvorgang als auch der Lesevorgang von demselben Taktsignal gesteuert werden. Da beide Seiten des FIFOs innerhalb des gleichen Taktbereichs arbeiten, ist das Timing-Management einfacher und Synchronisationsprobleme sind leichter zu vermeiden.
Eine häufige Anwendung ist die Sensor-Datenakquisition. In vielen Systemen kann ein Sensor Daten viel schneller erzeugen als die Kommunikationsschnittstelle, die für die Übertragung dieser Daten an ein anderes Gerät verantwortlich ist.
Beispielsweise kann ein FPGA Daten von einem Sensor über eine Hochgeschwindigkeits-SPI-Schnittstelle sammeln. Jede Sensorsichtmessung kommt schnell an und muss sofort gespeichert werden, um Informationsverlust zu vermeiden. Gleichzeitig müssen die gesammelten Daten möglicherweise über eine UART-Schnittstelle mit einer viel niedrigeren Baudrate übertragen werden.
Wenn Sensordaten in das FPGA eingehen, werden sie direkt in das FIFO geschrieben. Die gespeicherten Daten warten dann im Puffer, während die UART sie allmählich mit ihrer eigenen Geschwindigkeit überträgt. Während Daten das FIFO verlassen, gelangen neue Sensorsichtmessungen weiterhin in den Puffer. Dieser kontinuierliche Schreib- und Leseprozess ermöglicht es beiden Seiten des Systems, mit unterschiedlichen Datenraten zu arbeiten, während sie durch die gleiche Takquelle synchronisiert bleiben.
Durch das Absorbieren temporärer Geschwindigkeitsunterschiede zwischen Datenerfassung und Datenübertragung hilft ein FIFO mit einem einzelnen Takt, einen stabilen Datenfluss aufrechtzuerhalten und Datenverlust zu verhindern.
Dual Clock FIFO
Ein Dual Clock FIFO ist für Systeme ausgelegt, in denen die Schreib- und Leseseite mit unterschiedlichen Taktsignalen arbeiten. Diese Situation ist in FPGA-Designs häufig, da viele funktionale Blöcke mit unterschiedlichen Frequenzen und Timing-Anforderungen laufen.
Wenn Daten von einem Taktbereich in einen anderen übertragen werden, können direkte Verbindungen Synchronisationsprobleme erzeugen. Daten können zu früh, zu spät oder während instabiler Timing-Fenster ankommen, was zu unzuverlässigem Betrieb führt.
Ein Dual-Clock FIFO bietet eine sichere Grenze zwischen den beiden Taktbereichen. Eingehende Daten werden mit dem Quell-Takt in den FIFO geschrieben. Einmal gespeichert, verbleiben die Daten im Puffer, bis die Zielseite sie mit ihrem eigenen Takt liest. Der FIFO verwaltet den Übertragungsprozess intern, sodass beide Taktbereiche unabhängig arbeiten können.
Ein Videobearbeitungssystem bietet ein gutes Beispiel. Eine Kamera kann Bilddaten mit einer Taktfrequenz erfassen, während ein VGA-Controller Bilddaten mit einer anderen Taktfrequenz ausgibt. Während Bilddaten von der Kamera erzeugt werden, werden sie kontinuierlich in den FIFO geschrieben. Der VGA-Controller liest dann die gespeicherten Bilddaten mit der für die Anzeige erforderlichen Geschwindigkeit.
Da der Schreib-Takt und der Lese-Takt völlig unabhängig sind, fungiert der FIFO als Brücke zwischen den beiden Timing-Systemen. Dies ermöglicht es den Bilddaten, zuverlässig von der Kamera-Schnittstelle zur Display-Schnittstelle zu gelangen, ohne Synchronisationsfehler.
Aus diesem Grund werden Dual-Clock FIFOs häufig für die Taktbereichsüberschreitung, den Hochgeschwindigkeitsdatenübertrag, Videobearbeitungssysteme, Kommunikationsschnittstellen und andere Anwendungen eingesetzt, bei denen Daten zwischen unabhängigen Timing-Umgebungen übertragen werden müssen.
So verwenden Sie FIFO in Altera FPGA
Häufige Methoden zur Implementierung von FIFO
Altera FPGA-Geräte bieten mehrere Möglichkeiten zur Implementierung der FIFO-Funktionalität. Die beste Methode hängt von den Entwurfsanforderungen, dem Entwicklungszeitplan und dem erforderlichen Anpassungsgrad ab.
In den meisten Projekten bleibt das Ziel dasselbe. Ein FIFO muss zwischen zwei funktionalen Blöcken hinzugefügt werden, damit Daten vorübergehend gespeichert, zuverlässig übertragen und mit der erforderlichen Geschwindigkeit verarbeitet werden können. Der Unterschied liegt darin, wie der FIFO erstellt und in das FPGA-Design integriert wird.
Drei gängige Implementierungsmethoden werden häufig in der Altera FPGA-Entwicklung verwendet.
Erstellen eines benutzerdefinierten FIFO mit RTL-Code
Die erste Methode besteht darin, einen FIFO direkt mithilfe von RTL (Register Transfer Level)-Code zu erstellen.
Bei diesem Ansatz erstellt der Designer die gesamte FIFO-Struktur, einschließlich des Speicherarrays, des Lesezeigers, des Schreibezeigers, der Logik zur Vollerkennung, der Logik zur Leererkennung und der Steuerelektronik. Jeder Teil des FIFO-Betriebs wird manuell im HDL-Code definiert.
Diese Methode bietet das höchste Maß an Flexibilität. FIFO-Tiefe, Datenbreite, Statusflags und Steuerverhalten können an spezifische Anwendungsanforderungen angepasst werden. Zusätzliche Funktionen können ebenfalls hinzugefügt werden, wenn Standard-FIFO-Implementierungen die erforderliche Funktionalität nicht bieten.
Allerdings erfordert die Entwicklung eines FIFO von Grund auf ein starkes Verständnis der FIFO-Architektur, der Timing-Analyse und der FPGA-Designtechniken. Mehr Verifizierung und Tests sind ebenfalls erforderlich, um den zuverlässigen Betrieb unter allen Bedingungen zu gewährleisten.
Aus diesem Grund wird die Entwicklung benutzerdefinierter FIFOs in der Regel für Anwendungen reserviert, die spezialisierte Funktionen oder einzigartige Leistungsanforderungen erfordern.
Verwendung von Open-Source- oder Drittanbieter-FIFO-IP-Kernen
Die zweite Methode besteht darin, einen Open-Source- oder Drittanbieter-FIFO-IP-Kern zu verwenden.
Anstatt den FIFO von Grund auf neu zu entwerfen, wird ein vorhandenes FIFO-Modul in das Projekt importiert und an die umgebende Logik angeschlossen. Da der Quellcode häufig verfügbar ist, kann das Design immer noch angepasst werden, wenn zusätzliche Funktionen oder Anpassungen erforderlich sind.
Dieser Ansatz kann die Entwicklungszeit erheblich verkürzen. Ein Großteil der FIFO-Architektur wurde bereits erstellt, getestet und validiert, sodass sich die Designer auf die Systemintegration konzentrieren können, anstatt auf die Entwicklung auf niedriger Ebene eines FIFO.
Wenn die Projektanforderungen geringfügig von dem Standardverhalten eines FIFOs abweichen, kann der Quellcode bearbeitet werden, um die gewünschte Funktionalität zu unterstützen, während die erforderlichen Anstrengungen vermieden werden, um ein völlig neues FIFO-Design zu erstellen.
Verwendung des Quartus II FIFO IP-Kerns
Die gängigste Methode besteht darin, die vom Quartus II-Software bereitgestellten FIFO-IP-Kerne zu verwenden.
Quartus II umfasst integrierte FIFO-Generatoren, die es ermöglichen, FIFO-Strukturen über eine grafische Konfigurationsschnittstelle zu erstellen. Anstatt FIFO-Logik manuell zu schreiben, wählt der Designer die erforderlichen Parameter aus und lässt die Software die Implementierung automatisch generieren.
Während der Konfiguration können mehrere wichtige Einstellungen definiert werden. Dazu gehören:
• FIFO-Typ (Einzel- oder Doppel-Takt)
• Datenbreite
• FIFO-Tiefe
• Optionen zur Speicherimplementierung
• Voll- und Leerstatussignale
• Fast voll und fast leer Schwellenwerte
• Lese- und Schreibtaktsignaleinstellungen
Nachdem die Parameter ausgewählt sind, generiert Quartus II die FIFO-Dateien und die unterstützende Logik, die für das FPGA-Design erforderlich sind.
FIFO-Generierung und -Optimierung
Sobald die FIFO-Konfiguration abgeschlossen ist, erstellt Quartus II automatisch eine optimierte Implementierung für das ausgewählte Altera FPGA-Gerät.
Das generierte FIFO kann dann direkt mit der umgebenden Logik verbunden werden. Eingehende Daten sind mit der Schreibschnittstelle verbunden, ausgehende Daten sind mit der Leseschnittstelle verbunden, und Statussignale werden verwendet, um den Datenfluss im gesamten System zu steuern.
Da das generierte Design für die Ziel-FPGA-Architektur optimiert ist, ist die Ressourcennutzung typischerweise effizienter als viele manuell entwickelte Implementierungen. Die Entwicklungszeit wird ebenfalls verkürzt, da ein Großteil der Design-, Verifizierungs- und Optimierungsarbeiten automatisch von der Software übernommen wird.
Für die meisten FPGA-Projekte bietet der Quartus II FIFO-IP-Kern den schnellsten und einfachsten Weg zur Implementierung zuverlässiger FIFO-Funktionalität bei gleichzeitig effizienter Nutzung der FPGA-Ressourcen.
Fazit
FIFO bietet eine einfache und zuverlässige Möglichkeit, Daten zu puffern, Übertragungsraten anzupassen und die Kommunikation zwischen verschiedenen Systemkomponenten zu unterstützen. Durch das Verständnis von FIFO-Architekturen, Statussignalen, synchronem und asynchronem Betrieb sowie Implementierungsmethoden können Designer die Datenintegrität verbessern, Überlauf- und Unterlaufbedingungen verhindern und effizientere digitale Systeme entwickeln.
Häufig gestellte Fragen [FAQ]
1. Warum sind FIFO-Puffer unerlässlich, wenn verschiedene Teile eines digitalen Systems mit unterschiedlichen Geschwindigkeiten arbeiten?
FIFO-Puffer fungieren als temporärer Speicher zwischen datenproduzierenden und datenkonsumierenden Schaltungen. Wenn ein Gerät Daten schneller generiert, als ein anderes sie verarbeiten kann, speichert das FIFO die eingehenden Informationen und gibt sie frei, wenn das empfangende Gerät bereit ist. Dies verhindert Datenverlust, verbessert die Systemzuverlässigkeit und ermöglicht es beiden Schaltungen, unabhängig zu arbeiten, ohne dass eine perfekte Geschwindigkeitsanpassung erforderlich ist.
2. Warum werden asynchrone FIFOs häufig für den Taktbereichsübergang in FPGA-Designs verwendet?
Asynchrone FIFOs verwenden separate Takte für Schreib- und Lesevorgänge, was es ermöglicht, Daten sicher zwischen unabhängigen Taktdomänen zu übertragen. Dies verhindert Timing- und Synchronisationsprobleme, die auftreten können, wenn Signale direkt zwischen Schaltungen übertragen werden, die mit unterschiedlichen Frequenzen arbeiten. Daher werden asynchrone FIFOs häufig in Kommunikationsschnittstellen, Videosystemen, Prozessoren und Speichercontrollern eingesetzt.
3. Wie helfen FIFO-Statussignale, Überlauf- und Unterlaufbedingungen zu verhindern?
FIFO-Statussignale liefern Echtzeitinformationen über die Nutzung des Puffers. Voll- und fast-voll-Flags warnen, wenn der Speicherplatz knapp wird, während leer- und fast-leer-Flags anzeigen, wenn wenig oder keine Daten mehr verfügbar sind. Diese Signale ermöglichen es der Steuerlogik, Datenübertragungen anzupassen, bevor Fehler auftreten, und helfen, die Datenintegrität und den stabilen Betrieb des Systems aufrechtzuerhalten.
4. Warum werden Dual-Takt-FIFOs häufig in der Videoverarbeitung verwendet?
Videosysteme umfassen häufig Geräte, die mit unterschiedlichen Taktfrequenzen arbeiten, wie Kameras und Anzeigecontroller. Ein Dual-Takt-FIFO speichert eingehende Bilddaten mit einem Takt und ermöglicht dessen Lesung mit einem anderen Takt. Dies schafft eine zuverlässige Brücke zwischen den beiden Timing-Domänen und stellt einen kontinuierlichen Bildtransfer ohne Synchronisationsfehler oder Datenbeschädigung sicher.
5. Warum ziehen viele FPGA-Designer Quartus II FIFO-IP-Kerne vor, anstatt FIFOs von Grund auf neu zu erstellen?
Quartus II FIFO-IP-Kerne vereinfachen die Entwicklung, indem sie automatisch optimierte FIFO-Logik basierend auf benutzerdefinierten Einstellungen wie Tiefe, Breite, Takttyp und Statussignalen generieren. Dies reduziert die Entwurfszeit, minimiert den Verifizierungsaufwand und bietet oft eine bessere Ressourcennutzung als manuell codierte Implementierungen, was es zur bevorzugten Lösung für die meisten FPGA-Projekte macht.
Verwandter Blog
-
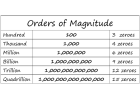
Wie viele Nullen in einer Million, Milliarden, Billionen?
![Wie viele Nullen in einer Million, Milliarden, Billionen?]()
2024/07/29
Millionen repräsentieren 106, eine leicht griffbare Figur im Vergleich zu alltäglichen Gegenständen oder jährlichen Gehältern. Milliarden, entspr... -
IRLZ44N MOSFET -Datenblatt, Schaltung, Äquivalent, Pinout
![IRLZ44N MOSFET -Datenblatt, Schaltung, Äquivalent, Pinout]()
2024/08/28
Der IRLZ44N ist ein weit verbreiteter N-Kanal-Power-MOSFET.Es ist bekannt für seine hervorragenden Schaltkapazitäten und eignet sich sehr für zahlr... -
Batteriestemperatur zu niedrig, das Laden gestoppt.Wie repariere ich es?
![Batteriestemperatur zu niedrig, das Laden gestoppt.Wie repariere ich es?]()
2024/10/6
Das Ladeproblemen von Mobiltelefonen sind häufig, können jedoch effektiv verwaltet werden.Die Temperatur spielt eine große Rolle bei der Batterieff... -
BC547 Transistor umfassender Leitfaden
![BC547 Transistor umfassender Leitfaden]()
2024/07/4
Der BC547 -Transistor wird üblicherweise in einer Vielzahl elektronischer Anwendungen verwendet, die von grundlegenden Signalverstärkern bis hin zu ... -
Ein vollständiger Leitfaden für Multiplexer und ihre Rolle in digitalen Systemen
![Ein vollständiger Leitfaden für Multiplexer und ihre Rolle in digitalen Systemen]()
2025/09/20
Multiplexer sind Komponenten in digitalen Systemen, mit denen mehrere Eingangssignale unter Verwendung binärer Logik- und Kontrollsignale in eine ein... -
Umfassende Anleitung zum SCR (Siliziumgesteuerte Gleichrichter)
![Umfassende Anleitung zum SCR (Siliziumgesteuerte Gleichrichter)]()
2024/04/22
Siliziumkontrollierte Gleichrichter (SCR) oder Thyristoren spielen aufgrund ihrer Leistung und Zuverlässigkeit eine entscheidende Rolle in der Energi... -
LR621, SR621SW, 364, AG1 -Batterieäquivalente und Ersatz
![LR621, SR621SW, 364, AG1 -Batterieäquivalente und Ersatz]()
2024/07/15
Die Batterien von LR621- und SR621SW -Tasten sind in kompakten elektronischen Geräten wie Uhren, kleinen Spielzeugen, Taschenrechnern und Fernschlüs... -
Grundlagen von Op-Ampere-Schaltungen
![Grundlagen von Op-Ampere-Schaltungen]()
2023/12/28
In der komplizierten Welt der Elektronik führt uns eine Reise in ihre Geheimnisse ausnahmslos zu einem Kaleidoskop aus exquisiten und komplexen Schal... -
Vergleich der Unterschiede und Anwendungen von NMOs und PMOS
![Vergleich der Unterschiede und Anwendungen von NMOs und PMOS]()
2024/11/15
Das Verständnis der Unterschiede zwischen NMOS- und PMOS -Transistoren ist wichtig für die Gestaltung effizienter Schaltkreise.NMOs (N-Type-Metallox... -
CR2450 gegen CR2032 Vergleich: Alles was Sie wissen müssen
![CR2450 gegen CR2032 Vergleich: Alles was Sie wissen müssen]()
2025/09/15
Button -Batterien wie CR2450 und CR2032 führen viele alltägliche Elektronik aus, von Uhren und Fernbedienungen bis hin zu medizinischen und industri...






Heiße Teile
- LTC6081IMS8#PBF
- MC-222263F9-B85X-BT3
- RC2010FK-0710RL
- TXC06885BIOG
- TPS76701QPWP
- MAX485CUA+T
- G1421BF3U
- SN75188DR
- TRJD335M050RRJ
- CRCW08054K70FKEA
- MC9328MXLVM15
- GRM0337U1H6R2DD01D
- TZ800N18KOFB1
- BCM8727MBIFBG-P21
- IDT7133SA25J
- PCF51AG128VLF
- 6MBP15RY060-01
- CGA9P4X7T2W105K250KE
- XC5VFX100T-2FF1136I
- 06033A3R3JAT2A
- ADG333ABRZ
- LMV339PWR
- STV8317F
- MAX5427ETA
- VN5160STR-E
- ADP151ACBZ-1.8
- NJM2902MX-TE2
- MIC4680YM-TR
- PAM8602MNHR
- GRM0335C1H2R9CD01D
- HI3520RBC100
- TPS22964CYZPT
- LPC3130FET180
- VSC8021FIL-AC-T
- AD71029AY
- AT89C51ED2-SLSIM
- CGA8N1C0G3F271K230KA
- LM2591HVS-ADJ/NOPB
- HPC3130PBK
- EMJ212CB7225MGHT
- V48C15C150BL
- VE-J10-CX
- LTM8064IY
- T491C107K010ZT7280Z320
- SSF-01T-P1.4
- CAT24C02YI
- WL80960JA33
- LNBP20APD
- TAJA226K010
- FX32K144HAT0MLHR